Subscribe
ROS ネットワークからメッセージを受信
ライブラリ:
ROS Toolbox /
ROS
説明
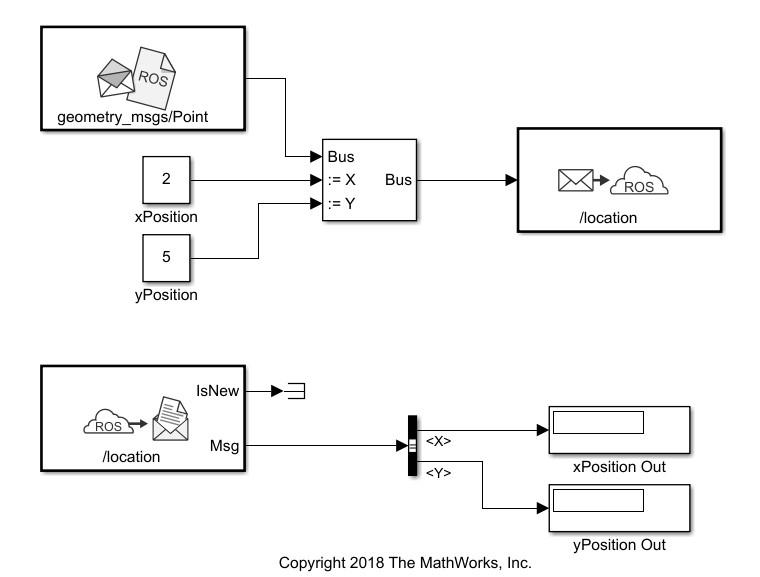
Subscribe ブロックは、指定された ROS メッセージ タイプに対応する Simulink® 非バーチャル バスを作成します。このブロックは Simulink モデルのノードを使用して、特定のトピックのための ROS サブスクライバーを作成します。このノードは、モデルの実行時に作成され、モデルの終了時に削除されます。モデルにノードがない場合は、このブロックによって作成されます。
各シミュレーション ステップで、ブロックは特定のトピックで新しいメッセージが使用可能かどうかをチェックします。新しいメッセージが使用可能な場合は、ブロックはメッセージを取得して Simulink バス信号に変換します。Msg 端子がこの新しいメッセージを出力します。新しいメッセージが使用可能でない場合は、Msg は最後に受け取った ROS メッセージを出力します。シミュレーションの開始後にメッセージをまったく受け取っていない場合は、Msg は空白のメッセージを出力します。
例
Simulink での ROS メッセージのパブリッシュとサブスクライブ
Simulink を使用して ROS トピックをパブリッシュおよびサブスクライブします。
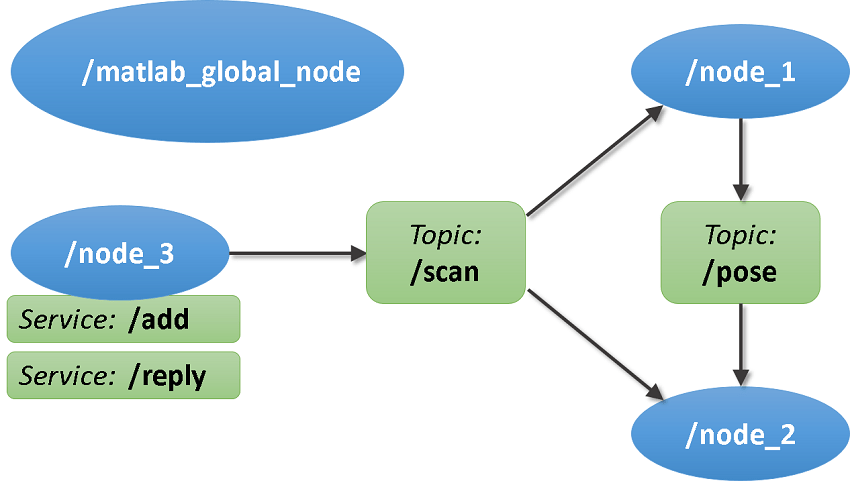
ROS 入門
MATLAB® 内で ROS を設定し、ROS ネットワークおよび ROS メッセージに関する情報を取得します。

Connect to ROS-enabled Robot from Simulink
Configure Simulink to connect to a separate robot simulator using ROS and then send velocity commands, and receive position information from a simulated robot.

Feedback Control of a ROS-Enabled Robot
Use Simulink to control a simulated robot running in a separate ROS-based simulator.
端子
出力
パラメーター
ヒント
ブロックの [ネットワーク アドレスの構成] リンクをクリックすると、ROS マスターとノード ホストのアドレスも設定できます。
拡張機能
バージョン履歴
R2019b で導入