Simulink での現在時間を使用した ROS メッセージのタイム スタンプ設定
この例では、コンピューターの現在のシステム時間を使用して ROS メッセージにタイム スタンプを付ける方法を説明します。"Current Time" ブロックを使用して、出力を std_msgs/Header メッセージの Stamp フィールドに代入します。メッセージを目的のトピック上にパブリッシュします。
ROS ネットワークに接続します。
rosinit
Launching ROS Core... ......Done in 7.3072 seconds. Initializing ROS master on http://172.18.250.141:50911. Initializing global node /matlab_global_node_88885 with NodeURI http://HYD-SHIVARAD:50593/
この例で用意されている Simulink® モデルを開きます。このモデルは "Bus Assignment" ブロックを使用して、"Current Time" 出力を ROS メッセージの Stamp フィールドに追加します。
open_system('current_time_stamp_message.slx')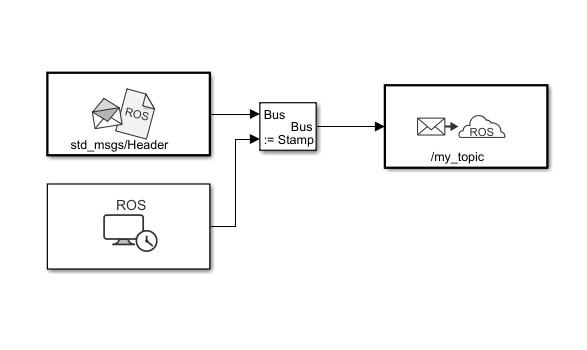
モデルを実行します。"Publish" ブロックが、現在のシステム時間を含む Header メッセージをパブリッシュします。
sim('current_time_stamp_message.slx')ROS ネットワークをシャットダウンします。
rosshutdown
Shutting down global node /matlab_global_node_88885 with NodeURI http://HYD-SHIVARAD:50593/ Shutting down ROS master on http://172.18.250.141:50911.