Current Time
現在の ROS 時間またはシステム時間の取得
ライブラリ:
ROS Toolbox /
ROS
説明
Current Time ブロックは、現在の ROS 時間またはシステム時間を出力します。ROS 時間は、コンピューターのシステム クロック、または ROS ノードでパブリッシュされる /clock トピックに基づきます。
このブロックを使用して、接続している ROS ノードとシミュレーション時間を同期させます。
ROS パラメーター use_sim_time が true に設定されている場合、このブロックは /clock トピックでパブリッシュされているシミュレーション時間を返します。それ以外の場合、このブロックはマシンのシステム時間を返します。

例
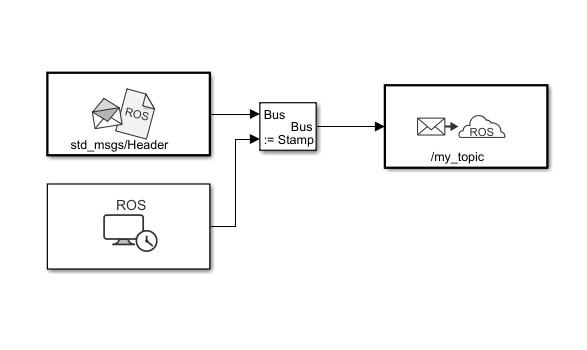
Simulink での現在時間を使用した ROS メッセージのタイム スタンプ設定
コンピューターの現在のシステム時間を使用して ROS メッセージにタイム スタンプを設定します。
端子
出力
パラメーター
ヒント
use_sim_timeパラメーターを設定し、/clockトピックから時間を取得するには、以下の手順に従います。ROS ネットワークに接続し、その後 Set Parameter ブロックを使用するか、MATLAB® コマンド ウィンドウでパラメーターを設定します。
ptree = rosparam; set(ptree,'/use_sim_time',true)
通常、
/clockトピックでパブリッシュする ROS ノードがパラメーターを設定します。
拡張機能
バージョン履歴
R2019b で導入