ネットワーク アクセス
MATLAB® と Simulink® で ROS 2 および ROS ネットワークに接続する
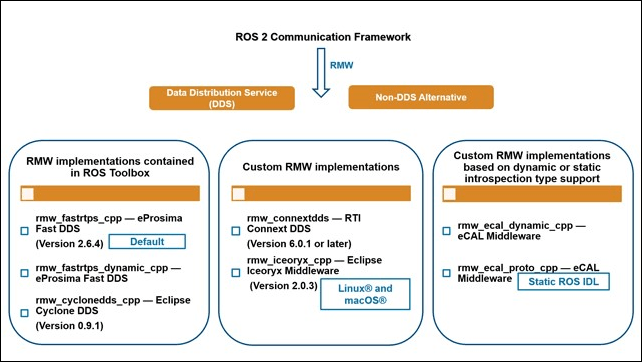
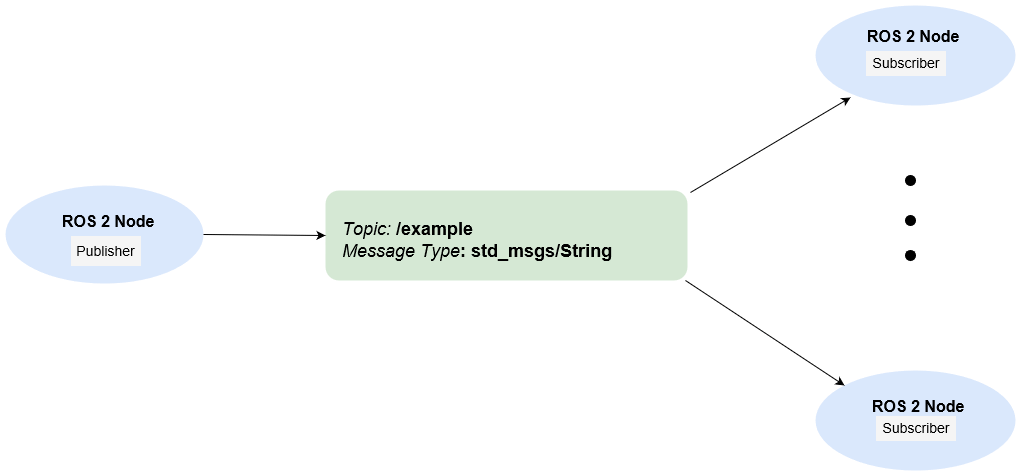
ROS Toolbox には、MATLAB と Simulink を使ったデスクトップ シミュレーションやハードウェア インターフェイスを実現するために、既存の ROS および ROS 2 ネットワークへの接続や ROS および ROS 2 ネットワークの作成を行うためのインターフェイスが用意されています。複数の ROS および ROS 2 ノードを作成するかこれらにアクセスし、サブスクライバーとパブリッシャーを使用してそれらのノード間の通信を確立できます。また、ネットワーク上で ROS および ROS 2 パラメーターや ROS および ROS 2 変換を作成したりアクセスしたりできます。ROS および ROS 2 ノードの詳細については、ROS 2 ネットワークへの接続およびROS ネットワークへの接続を参照してください。
サービス クライアントから要求を受信してタスクを実行し、応答を提供できる ROS および ROS 2 サービス サーバーを作成したりアクセスしたりできます。ROS および ROS 2 サービスの詳細については、Call and Provide ROS 2 ServicesおよびCall and Provide ROS Servicesを参照してください。
また、アクション クライアントからゴール実行要求を受信し、ゴール実行プロセス中にフィードバックを提供できる ROS および ROS 2 アクション サーバーを作成したりアクセスしたりできます。ROS アクションの詳細については、ROS Actions Overviewを参照してください。
カテゴリ
- ROS 2 ネットワーク アクセス
MATLAB と Simulink で ROS 2 ネットワークに接続する
- ROS ネットワーク アクセス
MATLAB と Simulink で ROS ネットワークに接続する
注目の例










You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)