ROS のパブリッシャーおよびサブスクライバーとのデータ交換
この例では、ROS ネットワーク内でトピックにパブリッシュおよびサブスクライブする方法を説明します。
ROS ノードがデータを交換するための主なメカニズムは、"メッセージ" を送受信することです。メッセージは "トピック" 上で送信され、各トピックは ROS ネットワーク内で一意の名前をもちます。あるノードが情報を共有する場合、そのノードは "パブリッシャー" を使用してデータをトピックに送信します。その情報を受信するノードは、同じトピックの "サブスクライバー" を使用します。各トピックには一意の名前の他に "メッセージ タイプ" もあり、そのトピックで送信可能なメッセージのタイプが決まります。
このパブリッシャーとサブスクライバーの通信には、次のような特性があります。
トピックは多対多の通信に使用されます。多数のパブリッシャーが同じトピックにメッセージを送信でき、多数のサブスクライバーがそれらを受信できます。
パブリッシャーとサブスクライバーはトピックを通じて分離され、任意の順序で作成および破棄できます。アクティブなサブスクライバーがない場合でも、メッセージをトピックにパブリッシュできます。
トピック、パブリッシャー、およびサブスクライバーの概念を次の図に示します。

この例では、ROS ネットワーク内でトピックにパブリッシュおよびサブスクライブする方法の他、以下の方法についても説明します。
新しいメッセージを受信するまで待機する
コールバックを使用して、新しいメッセージをバックグラウンドで処理する
サブスクライブしてメッセージを待つ
rosinitコマンドを使用して MATLAB® で ROS マスターを起動します。
rosinit
Launching ROS Core... ...Done in 3.6961 seconds. Initializing ROS master on http://172.19.136.75:56426. Initializing global node /matlab_global_node_67357 with NodeURI http://vdi-wd1bgl-223:60706/ and MasterURI http://localhost:56426.
提供された補助関数 exampleHelperROSCreateSampleNetwork を使用して、複数のパブリッシャーおよびサブスクライバーを含むサンプルの ROS ネットワークを作成します。
exampleHelperROSCreateSampleNetwork
rostopiclist を使用して、使用可能なトピックを確認します。
rostopic list/pose /rosout /scan /tf
rostopic info を使用して、/scan トピックにパブリッシュしているノードがあるかどうかをチェックします。以下のコマンドは、node_3 がパブリッシュしていることを示しています。
rostopic info /scan
Type: sensor_msgs/LaserScan Publishers: * /node_3 (http://vdi-wd1bgl-223:60722/) Subscribers: * /node_1 (http://vdi-wd1bgl-223:60711/) * /node_2 (http://vdi-wd1bgl-223:60717/)
rossubscriberを使用して /scan トピックをサブスクライブします。このケースのように、ROS ネットワーク内にトピックが既に存在する場合、メッセージ タイプは rossubscriber で自動的に検出されるため、指定する必要はありません。メッセージを struct 形式で使用すると効率性が向上します。
laser = rossubscriber("/scan","DataFormat","struct"); pause(2)
receiveを使用して新しいメッセージを待ちます。(2 番目の引数は秒単位のタイムアウト)。出力 scandata に、受信したメッセージ データが含まれます。
scandata = receive(laser,10)
scandata = struct with fields:
MessageType: 'sensor_msgs/LaserScan'
Header: [1×1 struct]
AngleMin: -0.5467
AngleMax: 0.5467
AngleIncrement: 0.0017
TimeIncrement: 0
ScanTime: 0.0330
RangeMin: 0.4500
RangeMax: 10
Ranges: [640×1 single]
Intensities: []
一部のメッセージ タイプには、可視化機能が関連付けられています。LaserScan メッセージの場合は、rosPlotがスキャン データをプロットします。MaximumRange の名前と値のペアは、最大プロット範囲を指定します。
figure
rosPlot(scandata,"MaximumRange",7)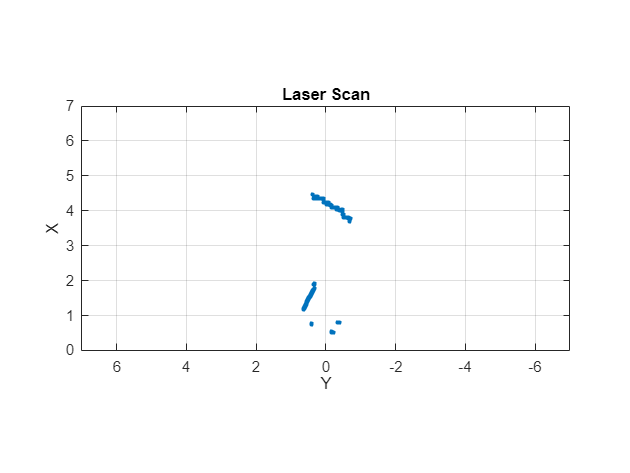
コールバック関数を使用したサブスクライブ
receiveを使用してデータを取得する代わりに、新しいメッセージを受信したときに呼び出される関数を指定できます。これにより、サブスクライバーが新しいメッセージを待っている間に他の MATLAB コードを実行できます。複数のサブスクライバーを使用する場合は、コールバックが不可欠です。
コールバック関数 exampleHelperROSPoseCallback を使用して、/pose トピックをサブスクライブします。
robotpose = rossubscriber("/pose",@exampleHelperROSPoseCallback,"DataFormat","struct")
robotpose =
Subscriber with properties:
TopicName: '/pose'
LatestMessage: []
MessageType: 'geometry_msgs/Twist'
BufferSize: 1
MessagePreprocessingEnabled: 0
NewMessageFcn: @exampleHelperROSPoseCallback
DataFormat: 'struct'
メインのワークスペースとコールバック関数の間でデータを共有する方法の 1 つは、グローバル変数を使用することです。2 つのグローバル変数 pos と orient を定義します。
global pos global orient
グローバル変数 pos および orient は、/pose トピックで新しいメッセージ データが受信されたときに、関数 exampleHelperROSPoseCallback 内で代入されます。
数秒間待機して、サブスクライバーがメッセージを受信できることを確認します。変数 pos および orient には、常に最新の位置と向きのデータが保存されます。
pause(2) pos
pos = 1×3
0.0429 0.0230 -0.0011
orient
orient = 1×3
0.0079 -0.0263 -0.0041
コマンド ラインで pos と orient を数回入力すると、値が継続的に更新されることを確認できます。
サブスクライバー変数をクリアして pose サブスクライバーを停止します。
clear robotposeメモ: グローバル変数を使用する以外にも、コールバック関数から情報を抽出する方法があります。たとえば、ハンドル オブジェクトを追加の引数としてコールバック関数に渡すことができます。コールバック関数の定義の詳細については、グラフィックス オブジェクトのコールバックの作成ドキュメンテーションを参照してください。
メッセージのパブリッシュ
ROS 文字列メッセージを /chatter トピックに送信するパブリッシャーを作成します (基本的な ROS メッセージの操作を参照)。
chatterpub = rospublisher("/chatter","std_msgs/String","DataFormat","struct")
chatterpub =
Publisher with properties:
TopicName: '/chatter'
NumSubscribers: 0
IsLatching: 1
MessageType: 'std_msgs/String'
DataFormat: 'struct'
pause(2) % Wait to ensure publisher is registered/chatter トピックに送信する ROS メッセージを作成して入力します。
chattermsg = rosmessage(chatterpub);
chattermsg.Data = 'hello world'chattermsg = struct with fields:
MessageType: 'std_msgs/String'
Data: 'hello world'
rostopic list を使用して、ROS ネットワークで /chatter トピックが使用可能であることを確認します。
rostopic list/chatter /pose /rosout /scan /tf
/chatter トピックのサブスクライバーを定義します。新しいメッセージを受信すると exampleHelperROSChatterCallback が呼び出され、メッセージ内の文字列の内容が表示されます。
chattersub = rossubscriber("/chatter",@exampleHelperROSChatterCallback,"DataFormat","struct")
chattersub =
Subscriber with properties:
TopicName: '/chatter'
LatestMessage: []
MessageType: 'std_msgs/String'
BufferSize: 1
MessagePreprocessingEnabled: 0
NewMessageFcn: @exampleHelperROSChatterCallback
DataFormat: 'struct'
/chatter トピックにメッセージをパブリッシュします。サブスクライバーのコールバックによって文字列が表示されます。
send(chatterpub,chattermsg) pause(2)
ans = 'hello world'
文字列メッセージをパブリッシュするとすぐに、関数 exampleHelperROSChatterCallback が呼び出されました。
ROS ネットワークのシャットダウン
サンプル ノード、パブリッシャーおよびサブスクライバーを ROS ネットワークから削除します。グローバル変数 pos および orient をクリアします。
exampleHelperROSShutDownSampleNetwork clear global pos orient
ROS マスターをシャットダウンしてグローバル ノードを削除します。
rosshutdown;