ROS 2 ネットワーク アクセス
ROS Toolbox には、MATLAB と Simulink を使ったデスクトップ シミュレーションやハードウェア インターフェイスを実現するために、既存の ROS 2 ネットワークへの接続や ROS 2 ネットワークの作成を行うためのインターフェイスが用意されています。複数の ROS 2 ノードを作成するかこれらにアクセスし、サブスクライバーとパブリッシャーを使用してそれらのノード間の通信を確立できます。また、ネットワーク上で ROS 2 パラメーターや ROS 2 変換を作成したりアクセスしたりできます。ROS 2 ノードの詳細については、ROS 2 ネットワークへの接続と通信の確立を参照してください。
サービス クライアントから要求を受信してタスクを実行し、応答を提供できる ROS 2 サービス サーバーを作成したりアクセスしたりできます。ROS 2 サービスの詳細については、Explore ROS 2 Services: Service Client and Service Server Guideを参照してください。
また、アクション クライアントからゴール実行要求を受信し、ゴール実行プロセス中にフィードバックを提供できる ROS 2 アクション サーバーを作成したりアクセスしたりできます。詳細については、Explore ROS 2 Actions: Action Client and Action Server Guideを参照してください。
カテゴリ
- ROS 2 ネットワーク接続と調査
ROS 2 ネットワークを設定して操作する
- MATLAB における ROS 2 ネットワーク アクセス
MATLAB を使用して ROS 2 のネットワークおよびメッセージにアクセスする
- Simulink における ROS 2 ネットワーク アクセス
Simulink を使用して ROS 2 のネットワークおよびメッセージにアクセスする
注目の例

Call and Provide ROS 2 Services
Set up service servers to advertise a service to the ROS network. In addition, you will learn how to use service clients to call the server and receive a response.

Access the tf Transformation Tree in ROS 2
Access tf Transformation Tree in ROS 2.

Switching Between ROS Middleware Implementations
Switch between different ROS 2 middleware implementations in MATLAB and Simulink.
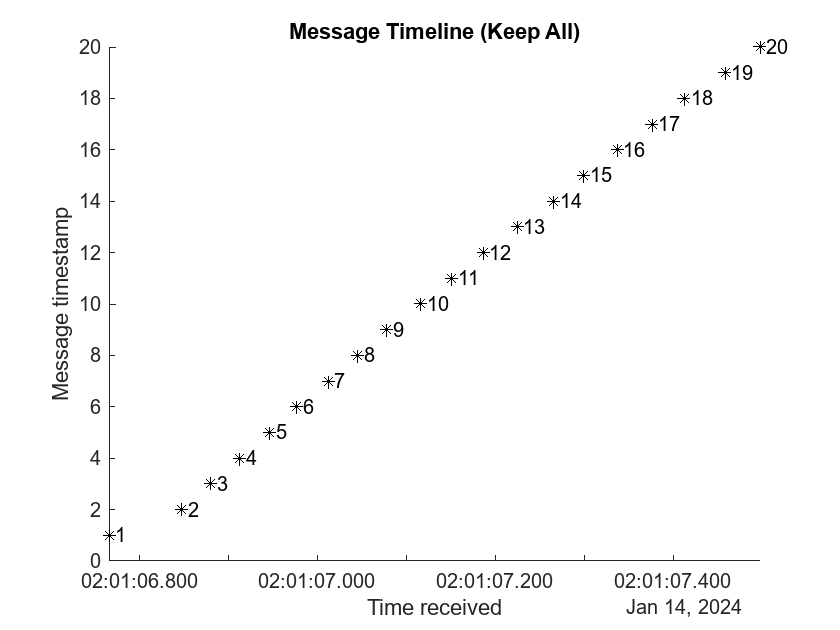
Manage Quality of Service Policies in ROS 2
Description of Quality of Service (QoS) policy options that allow changing the behavior of communication within a ROS 2 network.
Manage Quality of Service Policies in ROS 2 Application with TurtleBot
Demonstrates the best practices in managing Quality of Service (QoS) policies for an application using ROS 2.

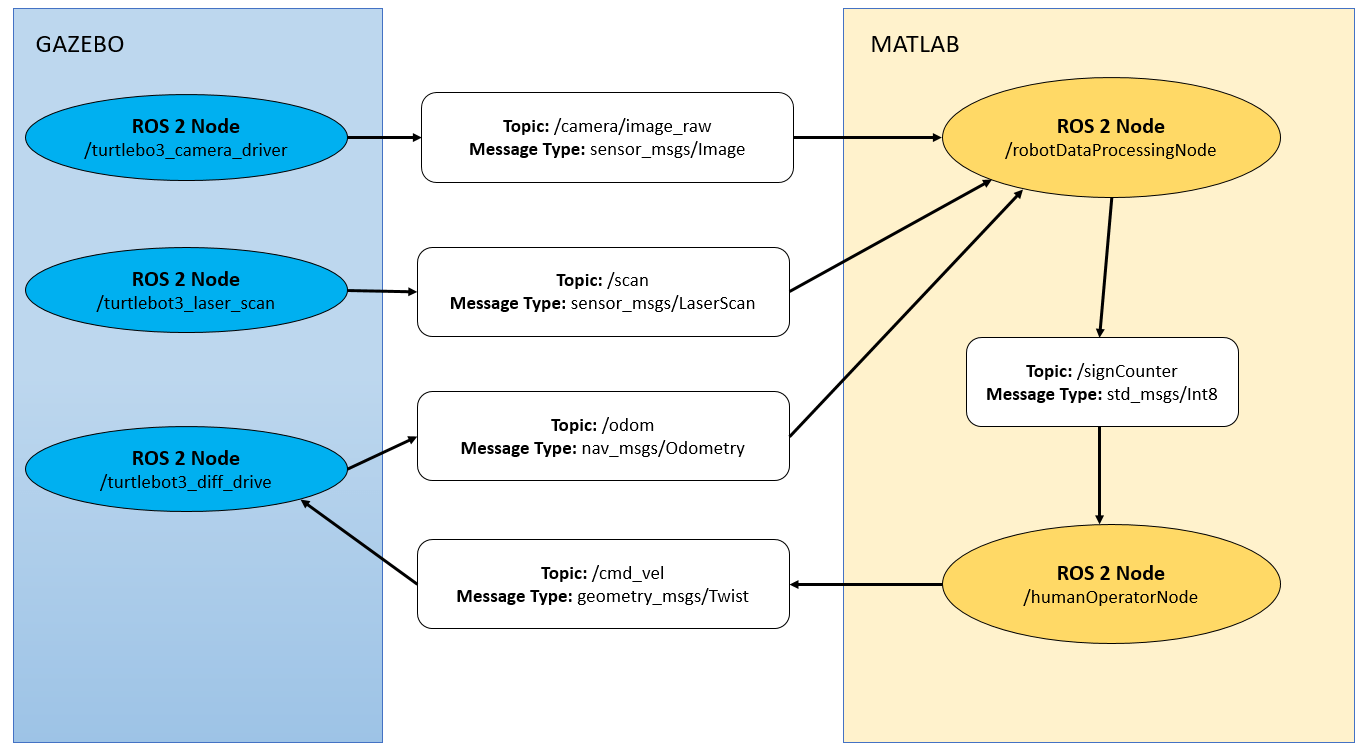
Use ROS Bridge to Establish Communication Between ROS and ROS 2
Control the TurtleBot3 in Gazebo using keyboard commands from MATLAB.

ROS 2 のパブリッシャーとサブスクライバーとのデータ交換
ROS ネットワーク内でトピックにパブリッシュおよびサブスクライブします。
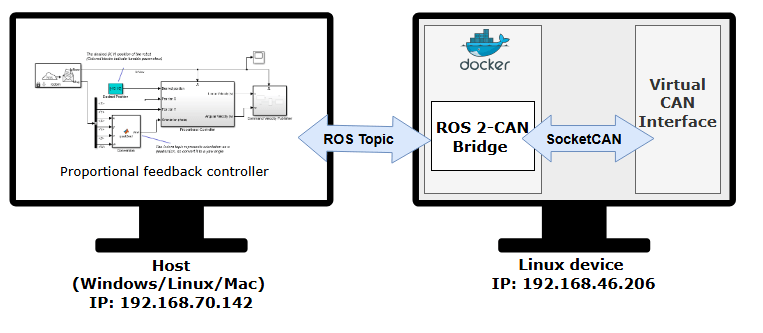
Send and Receive CAN Data in Simulink Using ROS 2-CAN Bridge Node
Design and test a feedback control algorithm in Simulink® using CAN messages exchanged between the CAN and ROS 2 network.

Plan Excavator Trajectory in ROS 2 Using Asynchronous Service Server
Use asynchronous ROS 2 service server in Simulink to plan and execute collision-free trajectories for a simulated autonomous excavator.