rosrate
Execute loop at fixed frequency
Description
The rosrate object allows you to execute a loop at a fixed
frequency. The rosrate object uses the global ROS node as a source
for time information. Therefore, it can use the ROS simulation or wall clock time (see
the IsSimulationTime property).
The performance of the rosrate object, and the ability to maintain
the desiredRate value depend on the publishing of the clock
information in ROS network. Because the rosrate object relies on the
pause function, disabling pause will result in
inaccurate execution.
If rosinit creates a ROS
master in MATLAB®, the global node uses wall clock time.
Tip
The scheduling resolution of your operating system and the level of other system activity can affect rate execution accuracy. As a result, accurate rate timing is limited to 100 Hz for execution of MATLAB code. To improve performance and execution speeds, use code generation.
Creation
Description
rate = rosrate(desiredRate)Rate object, which enables you to execute a
loop at a fixed frequency, DesiredRate. This syntax
sets the DesiredRate and
DesiredPeriod properties of the
Rate object. The time source is linked to the time
source of the global ROS node, which requires you to connect MATLAB to a ROS network using rosinit.
rate = ros.Rate(node,desiredRate)Rate object that operates loops at a fixed rate
based on the time source linked to the specified ROS node,
node.
Properties
This property is read-only.
Indicator if simulation or wall clock time is used, returned as
true or false. The value of this
property is same as that of the use_sim_time parameter
with these behaviors:
false— TheRateobject uses wall clock time to regulate the rate of loop execution.true— TheRateobject uses ROS simulation time published on the/clocktopic to regulate the rate of loop execution.
To set the use_sim_time parameter, follow these
steps:
ptree = rosparam; set(ptree,'/use_sim_time',true)
This property is read-only.
Desired execution rate of loop, specified as a scalar in hertz. When using
waitfor, the loop operates every
DesiredRate seconds, unless the loop takes longer. It
then begins the next loop based on the specified
OverRunAction.
This property is set during the object creation.
This property is read-only.
Desired time period between executions, specified as a scalar in seconds.
This property is equal to the inverse of
DesiredRate.
This property is set during the object creation.
This property is read-only.
Elapsed time since construction or reset, specified as a scalar in seconds.
Method for handling overruns, specified as one of these character vectors:
'drop'— waits until the next time interval equal to a multiple ofDesiredPeriod'slip'— immediately executes the loop again
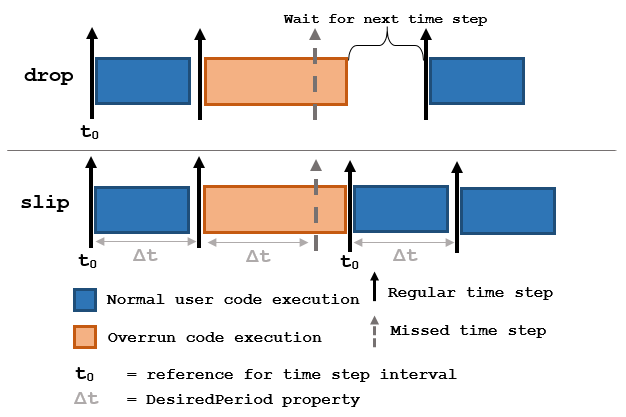
Each code section calls waitfor (Robotics System Toolbox) at the end of execution.
Object Functions
waitfor | Pause code execution to achieve desired execution rate |
statistics | Statistics of past execution periods |
reset | Reset Rate object |
Examples
Extended Capabilities
Version History
Introduced in R2019b