LiDAR 処理
先進運転支援システムでは、LiDAR スキャンから取得した 3-D 点群を使用して物理的表面を測定します。LiDAR 点群処理により、これらの点群のダウンサンプリング、ノイズ除去、変換を行ってから、クラスターに登録したりセグメント化したりできます。Velodyne パケット キャプチャ (PCAP) ファイルからインポートした点群も含め、点群の読み取り、書き込み、保存、表示、比較を行うこともできます。
深層学習アプローチを使用して、LiDAR 点群内の車線を検出することもできます。Automated Driving Toolbox™ には、K-Lane データ セットで学習させた LiDAR 車線検出ネットワークが用意されています。事前学習済みのネットワークにより、最大 6 車線を検出できます。分類精度、適合率、再現率、F1 スコアなどのさまざまな指標を使用して検出器のパフォーマンスを評価することもできます。
LiDAR 点群で車線を検出するには、アドオン エクスプローラーから Automated Driving Toolbox Model for Lidar Lane Detection サポート パッケージをダウンロードします。アドオンのダウンロードの詳細については、アドオンの取得と管理を参照してください。
関数
トピック
- Get Started with Lidar Lane Detection Using Deep Learning
Use lidar lane detection network to detect road lanes.
- LiDAR を使用した車両の検出、分類、および追跡 (Lidar Toolbox)
エゴ ビークルに取り付けられている LiDAR センサーによって取得された LiDAR 点群データを使用して、車両を検出、分類、追跡する。
注目の例

LiDAR を使用した地面および障害物の検出
3 次元 LiDAR データで地面を検出し、近くの障害物を検出します。
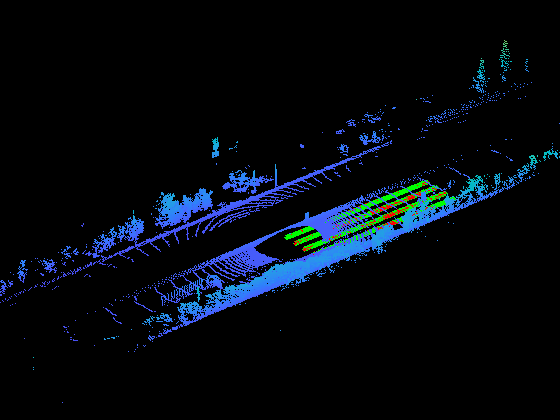
Lane Detection in Lidar Data Using Deep Learning
Detect lanes in lidar point clouds using LLDN-GFC deep learning network.