segmentGroundFromLidarData
Segment ground points from organized lidar data
Syntax
Description
groundPtsIdx = segmentGroundFromLidarData(ptCloud)ptCloud, into ground and
nonground parts. The lidar sensor must be mounted horizontally such that all ground
points are observed in the lidar scan closest to the sensor.
To use this function, the ground plane must be along the
x-y plane. You can use the pctransform to rotate the sensor
data before using segmentGroundFromLidarData.
groundPtsIdx = segmentGroundFromLidarData(ptCloud,Name=Value)segmentGroundFromLidarData(ptCloud,ElevationAngleDelta=5)
Examples
Segment ground points and nonground points from an organized lidar point cloud. Create organized point clouds from these segmentations, and display them.
Load an organized lidar, point cloud.
ld = load('drivingLidarPoints.mat');Segment ground points from the organized lidar point cloud.
groundPtsIdx = segmentGroundFromLidarData(ld.ptCloud);
Create an organized point cloud containing only these ground points by using the select function. Display this point cloud.
groundPtCloud = select(ld.ptCloud,groundPtsIdx); figure pcshow(groundPtCloud)

Create an organized point cloud containing only the nonground points. Specify a threshold of 0.5 meters.
nonGroundPtCloud = select(ld.ptCloud,~groundPtsIdx,'OutputSize','full'); distThreshold = 0.5; [labels,numClusters] = segmentLidarData(nonGroundPtCloud,distThreshold);
Display the nonground points cloud clusters.
figure
colormap(hsv(numClusters))
pcshow(nonGroundPtCloud.Location,labels)
title('Point Cloud Clusters')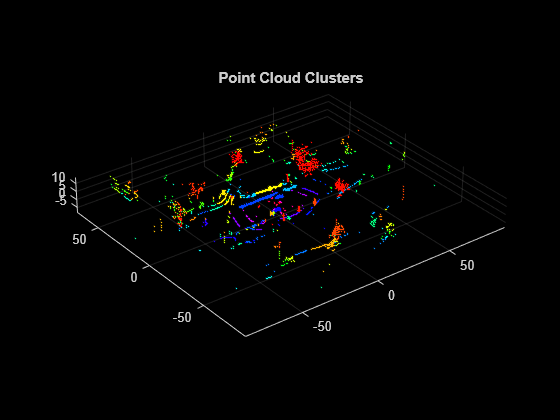
Load Velodyne PCAP® to the workspace.
velodyneFileReaderObj = velodyneFileReader('lidarData_ConstructionRoad.pcap','HDL32E');
Create a point cloud player using pcplayer. Define its x-, y-, and z-axes limits, in meters, and label its axes.
xlimits = [-40 40]; ylimits = [-15 15]; zlimits = [-3 3]; player = pcplayer(xlimits,ylimits,zlimits);
Label the pcplayer axes.
xlabel(player.Axes,'X (m)') ylabel(player.Axes,'Y (m)') zlabel(player.Axes,'Z (m)')
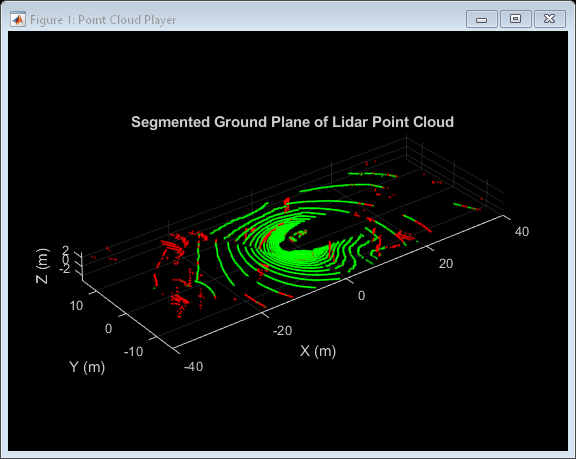
Set the colormap for labeling points. Use RGB triplets to specify green for ground-plane points, and red for obstacle points.
colors = [0 1 0; 1 0 0]; greenIdx = 1; redIdx = 2;
Iterate through the point clouds in the Velodyne PCAP file, using readFrame to read in the data. Segment the ground points from each point cloud. Color all ground points green and nonground points red. Plot the resulting lidar point cloud.
colormap(player.Axes,colors) title(player.Axes,'Segmented Ground Plane of Lidar Point Cloud'); for i = 1:velodyneFileReaderObj.NumberOfFrames % Read current frame. ptCloud = velodyneFileReaderObj.readFrame(i); % Create label array. colorLabels = zeros(size(ptCloud.Location,1),size(ptCloud.Location,2)); % Find the ground points. groundPtsIdx = segmentGroundFromLidarData(ptCloud); % Map color ground points to green. colorLabels(groundPtsIdx (:)) = greenIdx; % Map color nonground points to red. colorLabels(~groundPtsIdx (:)) = redIdx; % Plot the results. view(player,ptCloud.Location,colorLabels) end
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Bogoslavskyi, I. “Efficient Online Segmentation for Sparse 3D Laser Scans.” Journal of Photogrammetry, Remote Sensing and Geoinformation Science. Vol. 85, Number 1, 2017, pp. 41–52.
Extended Capabilities
Version History
Introduced in R2018b