pcsegdist
ユークリッド距離に基づいて点群をクラスターにセグメント化する
構文
説明
labels = pcsegdist(ptCloud,minDistance)minDistance を使用して点群をクラスターにセグメント化します。pcsegdist は点群の各点に整数クラスター ラベルを割り当て、すべての点の labels を返します。
[ はクラスター数も返します。labels,numClusters] = pcsegdist(ptCloud,minDistance)
[___] = pcsegdist(___, は、名前と値の引数を使用してプロパティを設定します。たとえば、Name=Value)labels = pcsegdist( は、各クラスターの点の最小数と最大数を ptCloud,minDistance,NumClusterPoints=[1,Inf])[1,Inf] に設定します。
例
2 つの同心球を作成して、それらを組み合わせます。
[X,Y,Z] = sphere(100);
loc1 = [X(:),Y(:),Z(:)];
loc2 = 2*loc1;
ptCloud = pointCloud([loc1;loc2]);
pcshow(ptCloud)
title('Point Cloud')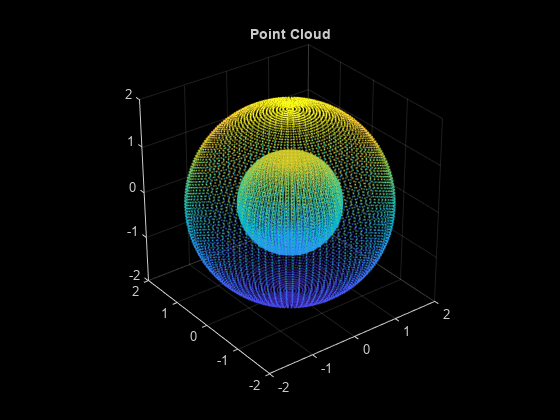
クラスター間の最小ユークリッド距離を設定します。
minDistance = 0.5;
点群をセグメント化します。
[labels,numClusters] = pcsegdist(ptCloud,minDistance);
ラベル付けした結果をプロットします。点は 2 つのクラスターにグループ化されます。
pcshow(ptCloud.Location,labels)
colormap(hsv(numClusters))
title('Point Cloud Clusters')
オーガナイズド LiDAR 点群をワークスペースに読み込みます。
ld = load('drivingLidarPoints.mat');グランド プレーンを検出します。距離はメートル単位で測定されます。
maxDistance = 0.9; referenceVector = [0 0 1]; [~,inliers,outliers] = pcfitplane(ld.ptCloud,maxDistance,referenceVector);
グランド プレーンの点を削除します。
ptCloudWithoutGround = select(ld.ptCloud,outliers);
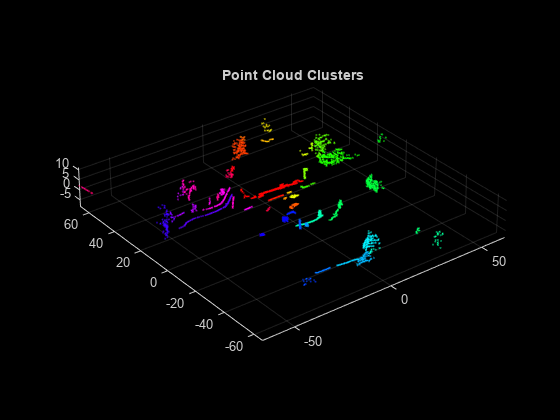
網羅的手法を使用して、クラスターごとに最低 10 個の点で点群をクラスター化します。
minDistance = 2; minPoints = 10; [labels,numClusters] = pcsegdist(ptCloudWithoutGround,minDistance,Method="exhaustive",... NumClusterPoints=minPoints);
ラベル値が 0 の点を削除します。
idxValidPoints = find(labels); labelColorIndex = labels(idxValidPoints); segmentedPtCloud = select(ptCloudWithoutGround,idxValidPoints);
ラベル付けした結果をプロットします。
figure
colormap(hsv(numClusters))
pcshow(segmentedPtCloud.Location,labelColorIndex)
title('Point Cloud Clusters')