Simulation 3D Scene Configuration
3D シミュレーション環境のシーン構成
ライブラリ:
Offroad Autonomy Library /
Simulation 3D
Aerospace Blockset /
Animation /
Simulation 3D
Automated Driving Toolbox /
Simulation 3D
Robotics System Toolbox /
Simulation 3D
Simulink 3D Animation /
Simulation 3D /
Environment
UAV Toolbox /
Simulation 3D
Vehicle Dynamics Blockset /
Vehicle Scenarios /
Sim3D /
Sim3D Core
説明
メモ
Simulation 3D Scene Configuration ブロックを含むモデルのシミュレーションには、Simulink® 3D Animation™ が必要です。
Simulation 3D Scene Configuration ブロックは、Epic Games® の Unreal Engine® を使用してレンダリングされる 3D シミュレーション環境を実装します。Vehicle Dynamics Blockset™ による 3D シミュレーション環境と Simulink の統合により、車両周囲の環境を照会して、知覚、制御、計画の各アルゴリズムをバーチャルにテストできます。このブロックを使用すると、シーン内の太陽の位置と気象条件も制御できます。詳細については、太陽の位置と気象を参照してください。
あらかじめ用意された一連のシーン、または独自のカスタム シーンからシミュレーションを実行できます。シーンをカスタマイズするには、Vehicle Dynamics Blockset Interface for Unreal Engine Projects サポート パッケージが必要です。詳細については、車両運動のシミュレーションのための 3D シーンのカスタマイズを参照してください。
また、RoadRunner で設計および構築されたカスタム シーンをシミュレーションすることもできます。これを行うには、まず RoadRunner からシーンをエクスポートし、エクスポートしたシーンのアーティファクトへのパスを Simulation 3D Scene Configuration ブロックの [プロジェクト] パラメーターで指定する必要があります。
ヒント
Simulation 3D Scene Configuration ブロックは、3D 環境にデータを送信するブロックの後、かつ 3D 環境からにデータを受信するブロックの前に実行する必要があります。そのようなブロックの実行順序を確認するには、ブロックを右クリックして [プロパティ] ボタン  をクリックします。次に、[一般] タブで、[優先順位] の設定が次になっていることを確認します。
をクリックします。次に、[一般] タブで、[優先順位] の設定が次になっていることを確認します。
3D 環境にデータを送信するブロックについては (Simulation 3D Vehicle with Ground Following ブロックなど)、[優先順位] を
-1に設定して、3D 環境で受信されるデータを、これらのブロックで準備できるようにする必要があります。モデル内の Simulation 3D Scene Configuration ブロックについては、[優先順位] を
0に設定する必要があります。3D 環境からデータを受信するブロックについては (Simulation 3D Message Get ブロックなど)、[優先順位] を
1に設定して、これらのブロックで受信されるデータを 3D 環境で準備できるようにする必要があります。
実行順序の詳細については、実行順序の制御と表示を参照してください。
例

カメラおよびレイ トレーシング リファレンス アプリケーションによるシーン調査
カメラおよびレイ トレーシング リファレンス アプリケーション プロジェクトを使用して、車両運動モデルにおける 3D Unreal Engine シーンについて調査する。
パラメーター
シーン
シーンの選択
シミュレーションを実行するシーンのソース。次の表のいずれかのオプションとして指定します。
| オプション | 説明 |
|---|---|
Default Scenes | [シーン名] パラメーターで指定された、あらかじめ用意された既定のシーンのいずれかでシミュレーションを実行します。 |
RoadRunner | RoadRunner シーンでシミュレーションを実行します。RoadRunner シーンをインポートするには、[プロジェクト] パラメーターで対応するファイルを指定します。 以下のファイル形式を使用できます。
|
Unreal Executable | Unreal Engine の実行可能ファイルの一部であるシーンでシミュレーションを実行します。[プロジェクト名] パラメーターで実行可能ファイルを指定します。[シーン] パラメーターでシーンを指定します。 高速シミュレーション用として実行可能ファイルにパッケージ化されたカスタム シーンのシミュレーションを実行する場合に、このオプションを選択します。 |
Unreal Editor | Unreal Engine のプロジェクト ( カスタム シーンを開発している場合にこのオプションを選択します。[Unreal Editor を開く] をクリックすることにより、Simulink および Unreal Editor の内部でコシミュレーションを実行し、シミュレーション結果に基づいてシーンを変更できます。 |
シミュレーションを実行する、あらかじめ用意された 3D シーンの名前を指定します。このパラメーターは、既定のシーンおよび現在使用可能なシーンをリストします。追加のシーンをオンデマンドでインストールすることもできます。シーンがインストールされると、[シーン名] パラメーター リストに使用可能なすべてのシーン名が事前設定されます。シーンの詳細については、リスト内の対応するリファレンス ページを参照してください。
既定のシーンのオプションは以下のとおりです。
Empty scene— Empty SceneBlank scene— Blank SceneOpen surface— Open SurfaceDouble lane change— Double Lane ChangeEmpty Grass— Empty Grass
インストール可能なシーンは以下のとおりです。その他のシーンの詳細については、Unreal Engine 環境でのシミュレーション用の 3D シーンを参照してください。
Straight road— Straight RoadCurved road— Curved RoadParking lot— Parking LotUS city block— US City BlockUS highway— US HighwayVirtual Mcity— Virtual McityLarge parking lot— Large Parking LotZalaZONE High-Speed Handling Course— ZalaZONE Automotive Proving Ground High-Speed Handling CourseZalaZONE Hill Tracks— ZalaZONE Automotive Proving Ground Hill Tracks
新しいシーンをインストールするには、次を行います。
[インストール] をクリックします。
[アドオン インストーラー] ダイアログ ボックスで、インストールするシーンを選択します。
シーンをダウンロードしてインストールするには、[次へ] をクリックして指示に従います。シーンをインストール後、MATLAB® は再起動します。
インストール後、[シーン名] パラメーター リストから新しいシーンを選択できます。
Vehicle Dynamics Blockset Interface for Unreal Engine Projects には、上記のシーンのカスタマイズ可能なバージョンがあります。シーンのカスタマイズの詳細については、車両運動のシミュレーションのための 3D シーンのカスタマイズを参照してください。
依存関係
このパラメーターを有効にするには、[シーン ソース] を [Default Scenes] に設定します。
Unreal Engine の実行可能ファイルの名前。有効な実行可能プロジェクト ファイル名として指定します。ファイルを参照するか、バックスラッシュを使用してプロジェクト ファイルの絶対パスを指定できます。シミュレーションを実行するシーンをこのファイルから指定するには、[シーン] パラメーターを使用します。
既定で、[プロジェクト名] は VehicleSimulation.exe に設定されており、これは MATLAB 検索パス上にあります。
メモ
現在のバージョンの MATLAB とは互換性のないバージョンの Unreal Engine で作成されたカスタムの Unreal 実行可能ファイルを選択すると、次のいずれかのエラー メッセージが表示されます。
"Incompatible version of 3D Simulation engine: Undefined":Unreal 実行可能ファイルが R2023b より前の MATLAB リリース用にビルドされている場合"Incompatible version of 3D Simulation engine: 23.2.0":Unreal 実行可能ファイルが MATLAB R2023b 以降用にビルドされている場合
これらのエラーを解決するには、Unreal プロジェクトを移行し、インストールした最新のサポート パッケージを使用して実行可能ファイルをリビルドする必要があります。詳細については、車両運動のシミュレーションのための 3D シーンのカスタマイズを参照してください。
例: C:\Local\WindowsNoEditor\AutoVrtlEnv.exe
依存関係
このパラメーターを有効にするには、[シーン ソース] を [Unreal Executable] に設定します。
ASAM OpenDRIVE ファイルを指定します。Simulation 3D Scene Configuration ブロック パラメーター [Select ASAM OpenDRIVE file] を選択して、ASAM OpenDRIVE ファイルを指定します。Simulation 3D Vision Detection Generator (Automated Driving Toolbox) ブロックを使用する車線検出アプリケーションをカスタム シーンで実行する場合、ASAM OpenDRIVE ファイルが必要です。
依存関係
このパラメーターは、Scene Source を [Unreal Executable] または [Unreal Engine] のいずれかに設定した場合に使用できます。
データ型: Boolean
[プロジェクト名] パラメーターで指定した実行可能ファイルからのシーン名。有効なシーン名へのパスとして指定します。
Unreal Engine プロジェクトからシーンを実行可能ファイルにパッケージ化すると、Unreal Editor はシーンを実行可能ファイルの内部フォルダーに保存します。シーンは /Game 内の任意のフォルダーに保存できます。このため、シーン名の先頭に /Game/myMaps を付ける必要があります。このパスは、スラッシュを使用して指定する必要があります。ファイル名には、.umap 拡張子を指定しないでください。たとえば、シミュレーションを実行する実行可能ファイルからのシーンの名前が myScene.umap である場合は、[シーン] を /Game/myMaps/myScene として指定します。
あるいは、対応する Unreal Engine プロジェクト内でシーンを参照できます。これらのシーンは通常、プロジェクトの Content/Maps サブフォルダーに保存されます。このサブフォルダーには、プロジェクト内のすべてのシーンが含まれます。シーンの拡張子は .umap です。[プロジェクト名] パラメーターで指定した実行可能ファイルにパッケージ化したシーンのいずれかを選択します。バックスラッシュを使用し、シーンには .umap 拡張子を指定します。
既定では、[シーン] は /Game/Maps/HwStrght に設定されます。これは、[プロジェクト名] パラメーターで指定される既定の実行可能ファイル VehicleSimulation.exe に含まれるシーンです。このシーンは、あらかじめ用意された [Straight Road] シーンに対応します。
例: /Game/Maps/scene1
例: C:\Local\myProject\Content\Maps\scene1.umap
依存関係
このパラメーターを有効にするには、[シーン ソース] を [Unreal Executable] に設定します。
Unreal Engine のプロジェクト ファイルまたは RoadRunner ファイルの名前。有効なプロジェクト ファイル名として指定します。ファイルを参照するか、バックスラッシュを使用してファイルの絶対パスを指定できます。ファイル名にスペースが含まれていてはなりません。
Unreal Editor で Unreal Engine プロジェクト ファイルのシーンのシミュレーションを実行するには、[Unreal Editor を開く] をクリックします。Unreal Editor セッションが既に開かれている場合、このボタンは無効になっています。
シミュレーションを実行するには、Simulink で [実行] をクリックします。Unreal Editor の [Play] をクリックする前に、次の確認メッセージが [診断ビューアー] ウィンドウに表示されるまで待ちます。
In the Simulation 3D Scene Configuration block, you set the scene source to 'Unreal Editor'. In Unreal Editor, select 'Play' to view the scene.
RoadRunner シーンをシミュレートするには、Filmbox (.fbx)、ユニバーサル シーン記述 (USD)、RoadRunner シーン (.rrscene)、または RoadRunner シナリオ (.rrscenario) の形式でファイルをインポートできます。
シーンを Filmbox (
.fbx) 形式でシミュレートするには、エクスポートした RoadRunner シーン ファイルを含むフォルダーを参照し、.fbxファイルを指定します。Filmbox (.fbx) ファイルを使用した Unreal へのエクスポート (RoadRunner)でオプション "Unreal (.fbx, .xodr, .rrdata.xml)" を使用して、RoadRunner シーンをエクスポートできます。このオプションは、これら 3 つのファイルをフォルダーにエクスポートします。Filmbox (
.fbx) ファイルASAM OpenDrive (
.xodr) ファイルXML (
.rrdata.xml) ファイル
シーンを ユニバーサル シーン記述 (USD) 形式でシミュレートするには、エクスポートした RoadRunner シーン ファイルを含むフォルダーを参照し、
.usd、.usdc、.usdaのいずれかのファイルを選択します。USD ファイルからインポートしたアクターは、衝突検出に対応していません。RoadRunner シーンを USD 形式でエクスポートするには、Export to USD (RoadRunner)を参照してください。シーンを RoadRunner のシーンまたはシナリオ (
.rrsceneまたは.rrscenario) 形式でシミュレートするには、RoadRunner ファイルを含むフォルダーを参照し、対応するファイルを選択します。シミュレーション前に、MATLAB でroadrunnerSetup(RoadRunner) 関数を使用して、RoadRunner の統合を構成する必要があります。MATLAB コマンド ウィンドウに
roadrunnerSetup関数を入力します。[RoadRunner の設定] ダイアログ ボックスが開きます。
[RoadRunner プロジェクト フォルダー] と [RoadRunner インストール フォルダー] の場所を指定します。
RoadRunner シーンのエクスポートとシミュレーションの詳細については、Simulate in RoadRunner Scene (Simulink 3D Animation)を参照してください。
メモ
USD および RoadRunner のシーンまたはシナリオ (.rrscene または .rrscenario) ファイルのインポートは、Linux® ではサポートされていません。
依存関係
このパラメーターを有効にするには、[シーン ソース] を [Unreal Editor] または [RoadRunner] に設定します。
シーンのパラメーター
シミュレーション中にシーンを表示する視点を設定するバーチャル カメラの配置を構成します。[シーン ビュー] パラメーター リストには、モデル内の車両ブロックおよびアクター ブロックのすべての [名前] パラメーター値が、追加で作成したカスタム視点と共に事前設定されます。モデルに Simulation 3D Scene Configuration ブロックを追加すると、バーチャル カメラはシーン原点に配置されたままになります。カスタム視点に、あるいは車両またはアクターに追従するようにカメラを再配置するには、このパラメーターを更新します。
以下の表は、モデルに車両ブロック、アクター ブロック、カスタム視点が含まれていない場合の、[シーン ビュー] パラメーターのオプションのリストです。
| オプション | 説明 |
|---|---|
Custom |
|
Scene Origin |
|
以下の表は、モデルに車両ブロック、アクター ブロック、またはカスタム視点が含まれている場合の、追加のオプションのリストです。
| オプション | 説明 |
|---|---|
| 車両名 |
|
sim3d アクター名 |
|
| 視点名 |
|
キーボード ショートカットおよびマウス操作を使用して、3D 環境を表示および操作できます。キーボード ショートカットおよびマウス操作の詳細については、Navigate in Unreal Engine Environment (Simulink 3D Animation)を参照してください。
R2025a 以降
カスタム視点の名前を、文字配列または string スカラーとして指定します。
例: View1
依存関係
このパラメーターを有効にするには、[シーン ビュー] を [Custom] に設定します。
データ型: char | string
R2025a 以降
視点の並進 (x、y、z) を、1 行 3 列の実数ベクトル (m 単位) として指定します。
依存関係
このパラメーターを有効にするには、[シーン ビュー] を [Custom] に設定します。
データ型: double
R2025a 以降
視点の回転 (roll、pitch、yaw) を、1 行 3 列の実数ベクトル (度単位) として指定します。
依存関係
このパラメーターを有効にするには、[シーン ビュー] を [Custom] に設定します。
データ型: double
R2025a 以降
sim3d アクターの原点を基準とする視点の並進 (x、y、z) を、1 行 3 列の実数ベクトル (m 単位) として指定します。
依存関係
このパラメーターを有効にするには、[シーン ビュー] を sim3d アクター名に設定します。
データ型: double
R2025a 以降
sim3d アクターの原点と基準とする視点の回転 (roll、pitch、yaw) を、1 行 3 列の実数ベクトル (度単位) として指定します。
依存関係
このパラメーターを有効にするには、[シーン ビュー] を sim3d アクター名に設定します。
データ型: double
可視化エンジンのサンプル時間、Ts。正の実数スカラーとして指定します。単位は秒です。
可視化エンジンのグラフィックスのフレーム レートはサンプル時間の逆数です。たとえば、[サンプル時間] が 1/60 の場合、可視化エンジンのソルバーは 60 フレーム/秒のフレーム レートを実現しようとします。ただし、グラフィックス カードのパフォーマンスやモデルの複雑さなどの要因により、リアルタイム グラフィックスではしばしばフレーム レートが比較的低くなります。
可視化エンジンからデータを受信するブロックは、既定でこのサンプル レートを継承します。
3D 可視化環境で、結果を可視化せずに、つまり "ヘッドレス モード" でシミュレーションを実行するかどうかを選択します。
次の場合に、ヘッドレス モードでの実行を検討します。
さまざまな Unreal Engine のシナリオでモデルをテストするために、複数の 3D シミュレーションを並列実行する。
結果を可視化せずにモデル パラメーターを最適化する。たとえば、Unreal Engine で定義された地形のシナリオで車両サスペンションのパラメーターを調整する場合に、ヘッドレス モードの使用を検討します。
依存関係
このパラメーターを有効にするには、[シーン ソース] を [Default Scenes] または [Unreal Executable] に設定します。
気象
シミュレーション中にシーンの気象と太陽の位置を制御するかどうかを選択します。有効にしたパラメーターを使用して、太陽の位置、雲、霧、雨、および雪を変更します。
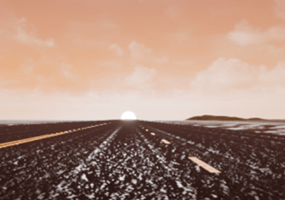
次の表は、特定時刻における太陽の位置の設定をまとめています。
| 時刻 | 設定 | Unreal Editor の環境 |
|---|---|---|
午前 0 時 | 太陽高度: -90 太陽方位角:180 |
|
北半球の日の出 | 太陽高度:0 太陽方位角:180 |
|
正午 | 太陽高度:90 太陽方位角:180 |
|
次の表は、特定の雲の状態の設定をまとめています。
| 雲の状態 | 設定 | Unreal Editor の環境 |
|---|---|---|
なし | 雲の不透明度:0 |
|
多量 | 雲の不透明度:85 |
|
| 多量 | ボリュメトリック クラウドを有効にする:オン 雲量:50 雲層の高度:6 |
|



次の表は、特定の霧の状態の設定をまとめています。
| 霧の状態 | 設定 | Unreal Editor の環境 |
|---|---|---|
なし | 霧の濃度:0 |
|
多量 | 霧の濃度:100 |
|

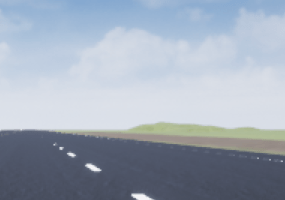
次の表は、特定の雨の状態の設定をまとめています。
| 雨の状態 | 設定 | Unreal Editor の環境 |
|---|---|---|
少量 | 雲の不透明度:10 雨の密度:25 |
|
多量 | 雲の不透明度:10 雨の密度:80 |
|


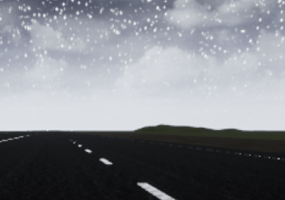
次の表は、特定の雪の状態の設定をまとめています。
| 雪の状態 | 設定 | Unreal Editor の環境 |
|---|---|---|
| 多量 | 降雪の密度:50 |
|

太陽
南から太陽光線の水平面投影までを測定した水平方向の方位角 (度単位)。
[太陽高度] と [太陽方位角] のパラメーターを使用して、シーンの時刻を制御します。たとえば、北半球の日の出を指定するには、[太陽高度] を 0 度、[太陽方位角] を 180 度に設定します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] を選択します。
太陽光線とその水平面投影がなす垂直方向の高度角 (度単位)。
[太陽高度] と [太陽方位角] のパラメーターを使用して、シーンの時刻を制御します。たとえば、北半球の日の出を指定するには、[太陽高度] を 0 度、[太陽方位角] を 180 度に設定します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] を選択します。
地理空間の太陽を有効にするには、このチェック ボックスをオンにします。地理空間の太陽を有効にすると、極付近、または昼夜の長さが大幅に異なる場所における状態のシミュレーションに役立ちます。
ワールド座標系を使用する 3D 環境では、負の "Y" 方向は東、正の "Y" 方向は西、負の "X" 方向は北、正の "X" 方向は南に対応します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] を選択します。
地球上の地理的位置の緯度。度単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] と [地理空間の太陽を有効にする] を選択します。
地球上の地理的位置の経度。度単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] と [地理空間の太陽を有効にする] を選択します。
日付。形式 YYYY-MM-DD の整数として指定します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] と [地理空間の太陽を有効にする] を選択します。
時間。形式 HH:MM:SS の整数として指定します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] と [地理空間の太陽を有効にする] を選択します。
タイム ゾーンは、協定世界時 (UTC) またはグリニッジ標準時 (GMT) からの時差を指定します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] と [地理空間の太陽を有効にする] を選択します。
夏時間を有効にするには、このチェック ボックスをオンにします。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] と [地理空間の太陽を有効にする] を選択します。
雲
Unreal Editor の [Cloud Speed] グローバル アクターのターゲット値に対応するパラメーター。正の値では雲が西から東に移動し、負の値では東から西に移動します。

[雲の不透明度] と [雲の速度] のパラメーターを使用して、シーンの雲を制御します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] を選択します。
Unreal Editor の [Cloud Opacity] グローバル アクターのターゲット値に対応するパラメーター (パーセント単位)。ゼロは雲のないシーンです。
[雲の不透明度] と [雲の速度] のパラメーターを使用して、シーンの雲を制御します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] を選択します。
ボリュメトリック クラウドを有効にするには、このチェック ボックスをオンにします。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] を選択します。
Unreal Editor の [Cloud Density] グローバル アクターのターゲット値に対応するパラメーター (パーセント単位)。
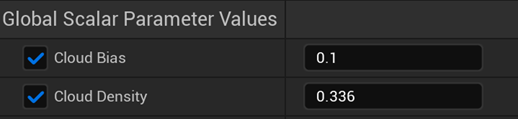
[雲量] パラメーターを使用して、シーンの雲を制御します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] と [ボリュメトリック クラウドを有効にする] を選択します。
Unreal Editor の [Layer Bottom Altitude] グローバル アクターのターゲット値に対応するパラメーター (km 単位)。

依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] と [ボリュメトリック クラウドを有効にする] を選択します。
霧
Unreal Editor の [Set Fog Density] と [Set Start Distance] のターゲット値に対応するパラメーター (パーセント単位)。

依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] を選択します。
雨
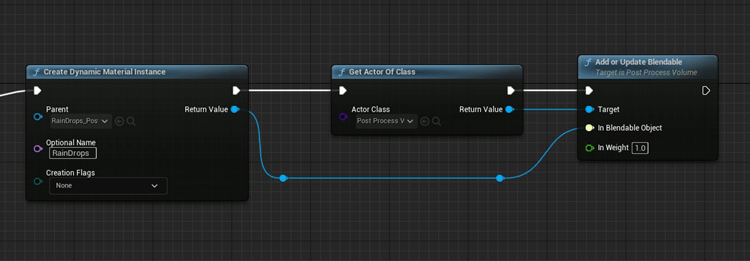
Unreal Editor の雨の密度、湿気、水たまり、その波紋を制御するローカル アクターに対応するパラメーター (パーセント単位)。
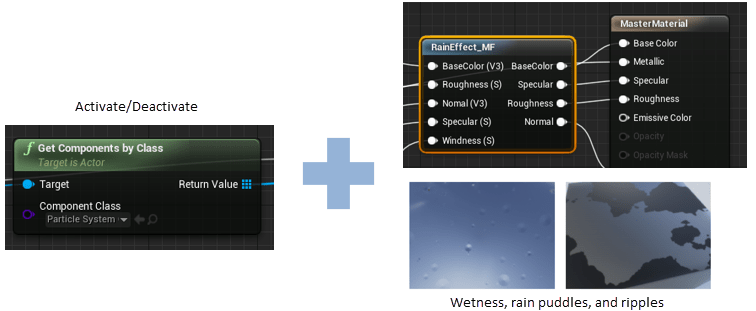
[雲の不透明度] と [雨の密度] のパラメーターを使用して、シーンの雨を制御します。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] を選択します。
カメラ レンズ上の雨滴を有効にするには、このチェック ボックスをオンにします。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] を選択します。
雪
このパラメーターは Unreal Editor で降雪の密度を制御するグローバル アクターに対応します (パーセント単位)。
依存関係
このパラメーターを有効にするには、[シーンの気象をオーバーライド] を選択します。
詳細
シーンの気象と太陽の位置を制御するには、[気象] タブで [シーンの気象をオーバーライド] を選択します。有効になったパラメーターを使用して、シミュレーション時の太陽の位置、雲、霧、および雨を変更します。
太陽の位置を制御するには、[太陽高度] と [太陽方位角] を使用します。
太陽高度 — 太陽光線とその水平面投影がなす垂直方向の高度角。
太陽方位角 — 南から太陽光線の水平面投影までを測定した水平方向の方位角。
あるいは、[地理空間の太陽を有効にする] を選択し、[緯度]、[経度]、[日付]、[時間]、および [タイム ゾーン] を使用して太陽の位置を制御します。地理空間の太陽を有効にすると、極付近、または昼夜の長さが大幅に異なる場所における状態のシミュレーションに役立ちます。
次の表は、特定時刻における太陽の位置の設定をまとめています。
| 時刻 | 設定 | Unreal Editor の環境 |
|---|---|---|
午前 0 時 | 太陽高度: -90 太陽方位角:180 |
|
北半球の日の出 | 太陽高度:0 太陽方位角:180 |
|
正午 | 太陽高度:90 太陽方位角:180 |
|
シーンの雲を制御するには、[雲の不透明度] と [雲の速度] を使用します。
雲の不透明度 — Unreal Editor の [Cloud Opacity] グローバル アクターのターゲット値。ゼロは雲のないシーンです。
雲の速度 — Unreal Editor の [Cloud Speed] グローバル アクターのターゲット値。正の値では雲が西から東に移動し、負の値では東から西に移動します。
シーンのボリュメトリック クラウドを制御するには、[ボリュメトリック クラウドを有効にする] を選択し、[雲量] と [雲層の高度] を使用します。
雲量 — Unreal Editor の [Cloud Density] グローバル アクターのターゲット値。
雲層の高度 — Unreal Editor の [Layer Bottom Altitude] グローバル アクターのターゲット値。
次の表は、特定の雲の状態の設定をまとめています。
| 雲の状態 | 設定 | Unreal Editor の環境 |
|---|---|---|
なし | 雲の不透明度:0 |
|
多量 | 雲の不透明度:85 |
|
| 多量 | ボリュメトリック クラウドを有効にする:オン 雲量:50 雲層の高度:6 |
|
シーンの霧を制御するには、[霧の濃度] を使用します。[霧の濃度] は、Unreal Editor の [Set Fog Density] に対応します。
次の表は、特定の霧の状態の設定をまとめています。
| 霧の状態 | 設定 | Unreal Editor の環境 |
|---|---|---|
なし | 霧の濃度:0 |
|
多量 | 霧の濃度:100 |
|
シーンの雨を制御するには、[雲の不透明度] と [雨の密度] を使用します。
雲の不透明度 — Unreal Editor の [Cloud Opacity] グローバル アクターのターゲット値。
雨の密度 — Unreal Editor の雨の密度、湿気、水たまり、その波紋を制御するローカル アクター。
次の表は、特定の雨の状態の設定をまとめています。
| 雨の状態 | 設定 | Unreal Editor の環境 |
|---|---|---|
少量 | 雲の不透明度:10 雨の密度:25 |
|
多量 | 雲の不透明度:10 雨の密度:80 |
|
シーンの雪を制御するには、[降雪の密度] を使用します。
降雪の密度 — Unreal Editor で降雪の密度を制御するグローバル アクター。
次の表は、特定の雪の状態の設定をまとめています。
| 雪の状態 | 設定 | Unreal Editor の環境 |
|---|---|---|
| 多量 | 降雪の密度:50 |
|