3D 環境でのシーン調査
メモ
3D 可視化環境でモデルのシミュレーションを実行するには、Simulink® 3D Animation™ が必要です。
カメラおよびレイ トレーシング リファレンス アプリケーションによるシーン調査は、3D 可視化環境との Simulink のインターフェイスを提供します。リファレンス アプリケーションをシミュレートする前に、以下を実行します。
システムがハードウェアの最小要件を満たしていることを確認します。詳細については、Unreal Engine シミュレーション環境の要件と制限を参照してください。
Virtual Mcity シーンをインストールします。詳細については、Virtual Mcity を参照してください。
カメラおよびレイ トレーシング リファレンス アプリケーションによるシーン調査には、次のものが含まれています。
シンプルな動力伝達装置、複合滑り車輪、3DOF の車両運動モデルを実装した 1 台の乗用車。
乗用車のバックミラーに取り付けられた 1 台のカメラ。
ステアリング、加速、ギア、ブレーキのコントロール。
車両のライトのコントロール。
Virtual Mcity シーン用に構成された 3D 可視化環境。
カメラおよびレイ トレーシング リファレンス アプリケーション プロジェクトの作業コピーを作成して開きます。
シミュレーションを実行すると、リファレンス アプリケーションにより、車両とシーンの次の情報が提供されます。
| ウィンドウ | 説明 | ||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Simulation 3D Viewer | Unreal Engine® 3D 可視化環境の画像フィードバックのビデオ出力。既定では、Simulation 3D Scene Configuration ブロックの [シーン ビュー] パラメーター カメラ ビューを滑らかに切り替えるには、次のキーボード ショートカットを使用します。
その他のカメラ コントロールについては、次のキーボード ショートカットを使用します。
| ||||||||||||||||||||||||||||||||||
SDL Video Display | Simulation 3D Camera Get ブロックのビデオ画像出力。既定では、次のパラメーター設定で指定されたビューが表示されます。
| ||||||||||||||||||||||||||||||||||





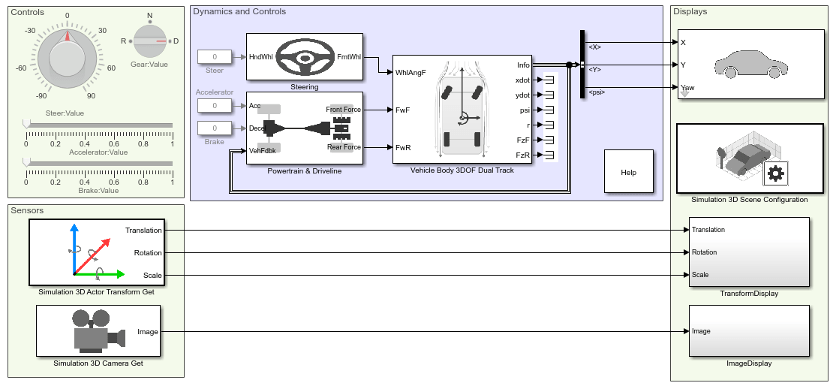
次の表は、リファレンス アプリケーションの各部分をまとめています。
| 名前 | 説明 |
|---|---|
Controls | 車両のステアリング、ギア、加速、ブレーキを制御するダイヤルとゲージ。ブレーキ コントロールにより、車両のブレーキ ライトが点灯します。ギア コントロールを R に設定すると、車両の後退灯が点灯します。 |
Sensors | Simulation 3D Actor Transform Get ブロックは、3D 可視化環境から乗用車の車両と四輪の並進、回転、スケールを返します。 Simulation 3D Camera Get ブロックは、3D 可視化環境からカメラ画像を返します。既定では、このブロックは次のパラメーター設定で指定されたカメラ位置の画像データを返します。
|
Dynamics and Controls | Simulink と連携して、車両のプラントとコントローラーの動的応答を計算します。既定では、このサブシステムには、シンプルな動力伝達装置と Vehicle 3DOF Dual Track ブロックの車両運動モデルが含まれています。 ヘッドライトと方向指示灯の制御に使用できる Light Controls サブシステムを実装します。 |
Displays | Simulation 3D Vehicle with Ground Following ブロックは、3D 可視化環境における乗用車を実装します。このブロックでは、車両の位置を使用して、車両が地上地形を進むように車両の仰角、ロール、およびピッチを調整します。既定では、このブロックのパラメーターは次のように設定されています。
Simulation 3D Scene Configuration ブロックは、Unreal Engine 3D 可視化環境を構成します。既定では、このブロックのパラメーターは次のように設定されています。
TransformDisplay サブシステムは、 ImageDisplay サブシステムは、[SDL Video Display] ウィンドウに Simulation 3D Camera Get ブロックのビデオ画像出力を表示します。 |
Displays サブシステム
TransformDisplay サブシステム
TransformDisplay サブシステムでは、Display ブロックで車体と四輪の並進、回転、スケールを提供します。表示の制御には Constant ブロックの値を使用します。
1— 並進2— 回転3— スケール
たとえば、並進の情報を表示するには、値を 1 に設定します。

この表示から次のことがわかります。
車体は、ワールド座標系の "X"、"Y"、"Z" のそれぞれの軸の
-212.5m、65.66m、0.0112m の位置にあります。車輪は、ワールド座標系の "X"、"Y"、"Z" のそれぞれの軸の初期位置にあります。
Display ブロックは、車両と車輪の位置の配列を提供します。
車両の並進と回転は、ワールド座標系の座標軸で示されます。
車輪の並進と回転は、それぞれの初期位置を基準とするワールド座標系の座標軸で示されます。
ImageDisplay サブシステム
ImageDisplay サブシステムでは、Level-2 MATLAB S-Function ブロックで関数 VideoDisplayMSfcnWin を使用して Simulation 3D Camera Get ブロックのビデオ画像出力を表示します。
参考
Simulation 3D Actor Transform Get | Simulation 3D Camera Get | Simulation 3D Scene Configuration | Virtual Mcity | Simulation 3D Vehicle with Ground Following
トピック
- カメラおよびレイ トレーシング リファレンス アプリケーションによるシーン調査
- Double Lane Change シーンのデータの送受信
- Unreal Engine 環境でのシミュレーション用の 3D シーン
- Vehicle Dynamics Blockset の座標系
- 車両運動のシミュレーションのための 3D シーンのカスタマイズ
- How Unreal Engine Simulation for Vehicle Dynamics Blockset Works