このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
Simulation 3D Camera Get
カメラ イメージ
ライブラリ:
Vehicle Dynamics Blockset /
Vehicle Scenarios /
Sim3D /
Sim3D Core
Aerospace Blockset /
Animation /
Simulation 3D
Simulink 3D Animation /
Simulation 3D /
Utilities
説明
メモ
Simulation 3D Camera Get ブロックを含むモデルのシミュレーションには、Simulink® 3D Animation™ が必要です。
Simulation 3D Camera Get ブロックは、3D 可視化環境における理想的なカメラへのインターフェイスを提供します。イメージ出力は、赤、緑、青 (RGB) の配列です。
サンプル時間を -1 に設定すると、ブロックは Simulation 3D Scene Configuration ブロックに指定されているサンプル時間を使用します。このセンサーを使用するには、必ず Simulation 3D Scene Configuration ブロックをモデルに含めます。
ヒント
Simulation 3D Scene Configuration ブロックが Simulation 3D Camera Get ブロックの前に実行されることを確認します。これにより、Unreal Engine® 3D 可視化環境で準備されたデータが Simulation 3D Camera Get ブロックで受信されます。ブロックの実行順序を確認するには、ブロックを右クリックして [プロパティ] を選択します。[一般] タブで、[優先順位] の設定が次のようになっていることを確認します。
Simulation 3D Scene Configuration —
0Simulation 3D Camera Get —
1
実行順序の詳細については、実行順序の制御と表示を参照してください。
例

カメラおよびレイ トレーシング リファレンス アプリケーションによるシーン調査
カメラおよびレイ トレーシング リファレンス アプリケーション プロジェクトを使用して、車両運動モデルにおける 3D Unreal Engine シーンについて調査する。
端子
出力
パラメーター
取り付け
一意のセンサー識別子。正の整数として指定します。この番号は、特定のセンサーを識別するために使用されます。このセンサー識別子により、マルチセンサー システムにおける複数のセンサーが区別されます。
例: 2
親の名前。ブロックにより、モデル内の親アクターのリストが提供されます。[Scene Origin] を選択すると、ブロックはセンサーをシーン原点に配置します。
例: SimulinkVehicle1
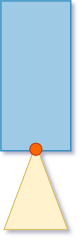
センサー取り付け位置。
[親の名前] が
[Scene Origin]である場合、ブロックはセンサーをシーン原点に取り付け、[取り付け位置] は[Origin]にのみ設定できます。シミュレーション中、センサーは静止したままです。[親の名前] が車両の名前 (
[SimulinkVehicle1]など) である場合、ブロックはセンサーを、次の表で説明されている事前定義された取り付け位置のいずれかに取り付けます。シミュレーション中、センサーは車両とともに移動します。
| 取り付け位置 | 説明 | 車両の原点を基準とする方向 [Roll, Pitch, Yaw] (度) |
|---|---|---|
原点 | 車両原点 (地面上、車両の幾何学的中心) に取り付けられた前向きのセンサー (Vehicle Dynamics Blockset の座標系を参照)
| [0, 0, 0] |
| フロント バンパーに取り付けられた前向きのセンサー
| [0, 0, 0] |
| リア バンパーに取り付けられた後向きのセンサー
| [0, 0, 180] |
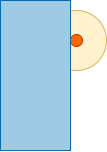
右ミラー | 右側のミラーに取り付けられた下向きのセンサー
| [0, -90, 0] |
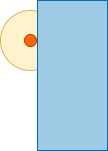
左ミラー | 左側のミラーに取り付けられた下向きのセンサー
| [0, -90, 0] |
バック ミラー | 車内のバック ミラーに取り付けられた前向きのセンサー
| [0, 0, 0] |
フードの中心 | フードの中心に取り付けられた前向きのセンサー
| [0, 0, 0] |
ルーフの中心 | ルーフの中心に取り付けられた前向きのセンサー
| [0, 0, 0] |




車両を基準にした位置 ("X"、"Y"、"Z") は、車両タイプによって異なります。車両タイプを指定するには、取り付ける Simulation 3D Vehicle with Ground Following ブロックの [タイプ] パラメーターを使用します。
表は、車両座標系でのセンサーの "X"、"Y"、"Z" の位置を示しています。この座標系では、次のとおりです。
"X" 軸は車両の前方向を指します。
"Y" 軸は車両を正面から見たときの左を指します。
"Z" 軸は地面から上方向を指します。
ロール、ピッチ、およびヨーは、"X" 軸、"Y" 軸、および "Z" 軸それぞれの正の方向を見たときに、時計回りが正になります。車両を上から見下ろした場合、軸の負の方向から見ているため、ヨー角 (方向角度) は反時計回りが正になります。
ボックス トラック — 車両の原点を基準とするセンサーの位置
| 取り付け位置 | X (m) | Y (m) | Z (m) |
|---|---|---|---|
フロント バンパー | 5.10 | 0 | 0.60 |
リア バンパー | -5 | 0 | 0.60 |
| 2.90 | 1.60 | 2.10 |
| 2.90 | -1.60 | 2.10 |
| 2.60 | 0.20 | 2.60 |
| 3.80 | 0 | 2.10 |
| 1.30 | 0 | 4.20 |
ハッチバック — 車両の原点を基準とするセンサーの位置
| 取り付け位置 | X (m) | Y (m) | Z (m) |
|---|---|---|---|
フロント バンパー | 1.93 | 0 | 0.51 |
リア バンパー | -1.93 | 0 | 0.51 |
| 0.43 | -0.84 | 1.01 |
| 0.43 | 0.84 | 1.01 |
| 0.32 | 0 | 1.27 |
| 1.44 | 0 | 1.01 |
| 0 | 0 | 1.57 |
マッスル カー — 車両の原点を基準とするセンサーの位置
| 取り付け位置 | X (m) | Y (m) | Z (m) |
|---|---|---|---|
フロント バンパー | 2.47 | 0 | 0.45 |
リア バンパー | -2.47 | 0 | 0.45 |
| 0.43 | -1.08 | 1.01 |
| 0.43 | 1.08 | 1.01 |
| 0.32 | 0 | 1.20 |
| 1.28 | 0 | 1.14 |
| -0.25 | 0 | 1.58 |
セダン — 車両の原点を基準とするセンサーの位置
| 取り付け位置 | X (m) | Y (m) | Z (m) |
|---|---|---|---|
フロント バンパー | 2.42 | 0 | 0.51 |
リア バンパー | -2.42 | 0 | 0.51 |
| 0.59 | -0.94 | 1.09 |
| 0.59 | 0.94 | 1.09 |
| 0.43 | 0 | 1.31 |
| 1.46 | 0 | 1.11 |
| -0.45 | 0 | 1.69 |
小型ピックアップ トラック — 車両の原点を基準とするセンサーの位置
| 取り付け位置 | X (m) | Y (m) | Z (m) |
|---|---|---|---|
フロント バンパー | 3.07 | 0 | 0.51 |
リア バンパー | -3.07 | 0 | 0.51 |
| 1.10 | -1.13 | 1.52 |
| 1.10 | 1.13 | 1.52 |
| 0.85 | 0 | 1.77 |
| 2.22 | 0 | 1.59 |
| 0 | 0 | 2.27 |
SUV — 車両の原点を基準とするセンサーの位置
| 取り付け位置 | X (m) | Y (m) | Z (m) |
|---|---|---|---|
フロント バンパー | 2.42 | 0 | 0.51 |
リア バンパー | -2.42 | 0 | 0.51 |
| 0.60 | -1 | 1.35 |
| 0.60 | 1 | 1.35 |
| 0.39 | 0 | 1.55 |
| 1.58 | 0 | 1.39 |
| -0.56 | 0 | 2 |
例: Origin
取り付け位置からのオフセットを指定する場合に、このパラメーターをオンにします。
車両座標系の "X" 軸、"Y" 軸、"Z" 軸を中心とした、取り付け位置からの並進オフセットを指定します。単位はメートルです。
"X" 軸は車両の前方向を指します。
"Y" 軸は車両を正面から見たときの左を指します。
"Z" 軸は上方向を指します。
例: [0,0,0.01]
依存関係
このパラメーターを有効にするには、[オフセットを指定] を選択します。
車両座標系の "X" 軸、"Y" 軸、"Z" 軸を中心とした、取り付け位置からの回転オフセットを指定します。単位は度です。
"ロール角" は、車両座標系の "X" 軸を中心とした回転角度です。正のロール角は、"X" 軸の正の方向を見たときの時計回りの回転に対応します。
"ピッチ角" は、車両座標系の "Y" 軸を中心とした回転角度です。正のピッチ角は、"Y" 軸の正の方向を見たときの時計回りの回転に対応します。
"ヨー角" は、車両座標系の "Z" 軸を中心とした回転角度です。正のヨー角は、"Z" 軸の正の方向を見たときの時計回りの回転に対応します。
例: [0,0,10]
依存関係
このパラメーターを有効にするには、[オフセットを指定] を選択します。
ブロックのサンプル時間 (秒単位)。3D シミュレーション環境のフレーム レートはサンプル時間の逆数です。
サンプル時間を -1 に設定すると、ブロックは Simulation 3D Scene Configuration ブロックに指定されているサンプル時間を使用します。
パラメーター
イメージの水平分解能 (ピクセル単位)。
イメージの垂直分解能 (ピクセル単位)。
水平方向の視野 (FOV) (度単位)。
ヒント
[Sim 3d Scene Cap] のタグを設定する方法、およびタグと Simulation 3D Camera Get ブロックの関係については、Unreal Editor でのアクターへのカメラの配置を参照してください。