Simulation 3D Actor Transform Get
アクターの並進、回転、スケールの取得
ライブラリ:
Vehicle Dynamics Blockset /
Vehicle Scenarios /
Sim3D /
Sim3D Core
Aerospace Blockset /
Animation /
Simulation 3D
Simulink 3D Animation /
Simulation 3D /
Utilities
説明
メモ
Simulation 3D Actor Transform Get ブロックを含むモデルのシミュレーションには、Simulink® 3D Animation™ が必要です。
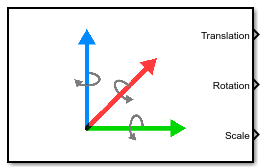
Simulation 3D Actor Transform Get ブロックは、Simulink シミュレーション環境におけるアクターの並進、回転、およびスケールを提供します。
このブロックは車両固定座標系を使用しますが、これは初期状態で慣性ワールド座標系と一致します。
| 軸 | 説明 |
|---|---|
| X | 車両の前進方向 ロール — "X" 軸を中心とした右手系の回転 |
| Y | 車両の右方向、初期状態で地面に平行 ピッチ — "Y" 軸を中心とした右手系の回転 |
| Z | 上方向 ヨー — "Z" 軸を中心とした左手系の回転 |
アクターは、3D の並進、回転、およびスケールをサポートするシーン オブジェクトです。パーツはアクターのコンポーネントです。コンポーネントは単体で存在せず、アクターに関連付けられます。
ヒント
Simulation 3D Scene Configuration ブロックが Simulation 3D Actor Transform Get ブロックの前に実行されることを確認します。これにより、Unreal Engine® 3D 可視化環境で準備されたデータが Simulation 3D Actor Transform Get ブロックで受信されます。ブロックの実行順序を確認するには、ブロックを右クリックして [プロパティ] ボタン  をクリックします。[一般] タブで、[優先順位] の設定が次のようになっていることを確認します。
をクリックします。[一般] タブで、[優先順位] の設定が次のようになっていることを確認します。
Simulation 3D Scene Configuration —
0Simulation 3D Actor Transform Get —
1
実行順序の詳細については、実行順序の制御と表示を参照してください。
例

カメラおよびレイ トレーシング リファレンス アプリケーションによるシーン調査
カメラおよびレイ トレーシング リファレンス アプリケーション プロジェクトを使用して、車両運動モデルにおける 3D Unreal Engine シーンについて調査する。