電気駆動装置
以下の例を使用して、非同期、同期、スイッチト リラクタンス付きの機械および制御をモデル化する方法を学習します。
注目の例

Visualize Four-Quadrant Operation of Electric Drive System
Helps you visualize the torque-speed trajectory of a Motor & Drive (System Level) block operated in all four quadrants.
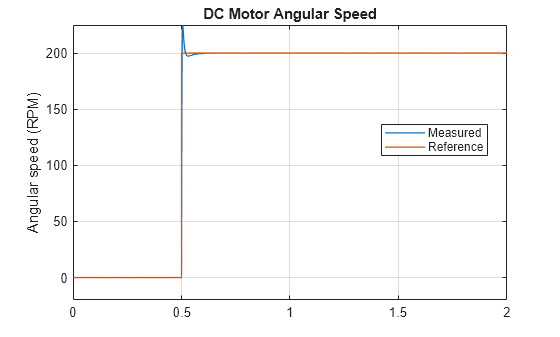
Design PID Control for DC Motor Using Classical Control Theory
Design a PID controller for a DC Motor using classical control theory. Alternatively, you can use Steady State Manager, Model Linearizer, Frequency Response Estimator, or PID tuner apps to streamline the design.
Classify Motor Faults Using Deep Learning
Train a deep learning model to classify faults in a permanent magnet synchronous motor (PMSM) using simulated data across various revolutions per minute (RPM). You use Simscape Electrical™ to create the model for a fault scenario, then use Deep Learning Toolbox™ to train a neural network to classify the fault data.

開放端の巻線をもつ三相 PMSM の速度の制御
この例では、開放端の巻線をもつ埋込永久磁石同期機 (IPMSM) において、回転子の角速度を制御する方法を説明します。高圧バッテリーは、2 台の制御された三相コンバーターを通して IPMSM に電力を供給します。IPMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的なトルク源が負荷を提供します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。Control サブシステムには、PI ベースのベクトル制御構造が含まれています。1 秒間のシミュレーション中、角速度要求は 0 rpm、500 rpm、2000 rpm、3000 rpm になります。
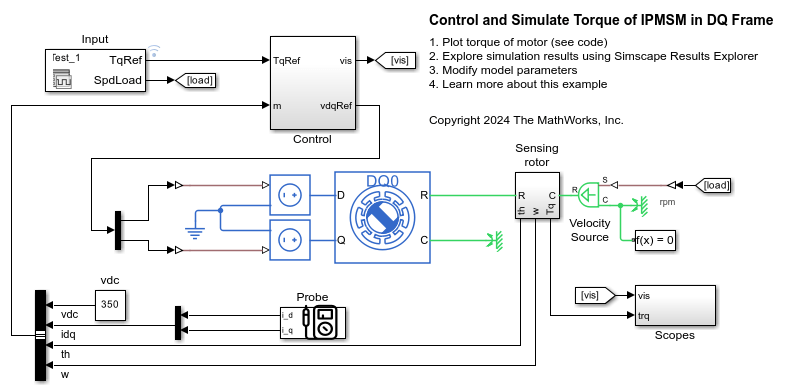
DQ 座標系での IPMSM のトルクの制御とシミュレーション
この例では、埋込永久磁石同期機 (IPMSM) の自動車の電気牽引駆動装置において、トルクを制御する方法を説明します。この例では、回転子の主磁束方向と直交方向 (DQ) の基準座標系でトルクを制御してシミュレーションを行います。DQ 基準座標系を使用して、コントローラーを設計し、シミュレーションを高速化することができます。IPMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的な角速度源が負荷を提供します。Control サブシステムは、IPMSM のトルク制御に開ループ アプローチを使用し、電流制御に閉ループ アプローチを使用します。制御アルゴリズムは、トルク要求を関連する指令電流に変換します。基準 DQ 電圧は IPMSM に電力を供給します。シミュレーションでは、モーター モードと発電機モードの両方で、複数のトルク ステップが行われます。
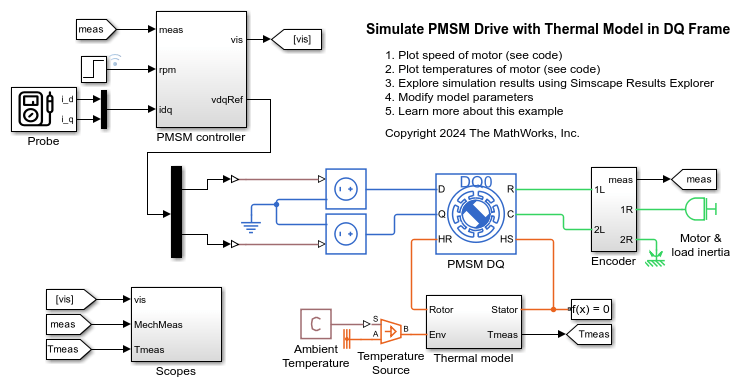
DQ 座標系での熱モデルをもつ PMSM 駆動のシミュレーション
この例では、主磁束方向と直交方向 (DQ) の基準座標系で永久磁石同期機 (PMSM) をシミュレーションする方法を示します。PMSM には、熱モデルと経験的な鉄損が含まれています。PMSM コントローラーを設計し、望ましい性能を達成するには、モデルのアーキテクチャとゲインを選択します。固定子と回転子の初期温度は摂氏 25 度です。周囲温度は摂氏 27 度です。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
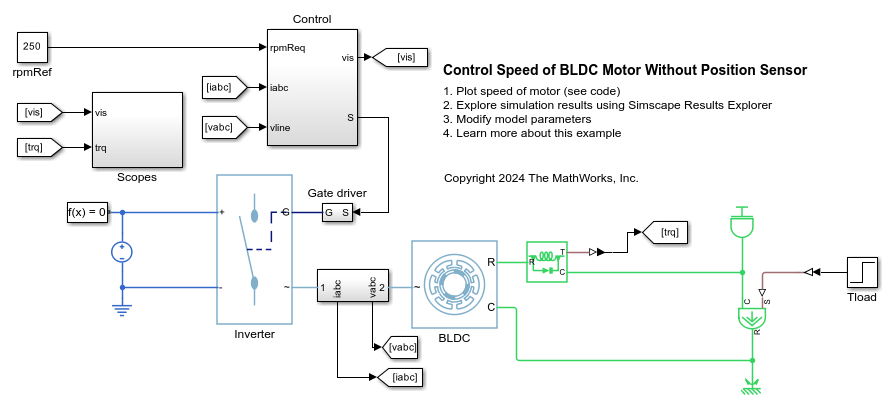
位置センサーをもたない BLDC モーターの速度の制御
この例では、位置センサーをもたないブラシレス直流 (BLDC) 電気駆動装置において、速度を制御する方法を説明します。DC 電圧源は、制御された三相インバーターを通して BLDC に電力を供給します。Control サブシステムは、センサーなしの速度制御手法を実装します。ヒステリシス コントローラーは、相電流を制御します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
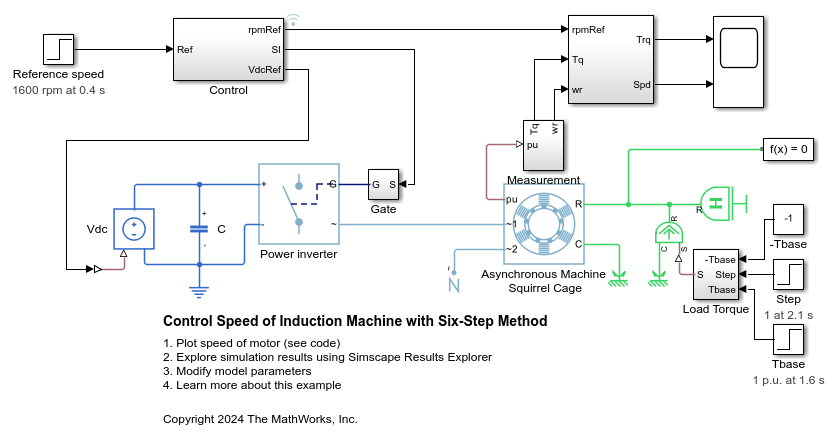
6 ステップ法を使用した誘導機の速度の制御
この例では、スカラー 6 ステップ制御法を使用して非同期機 (ASM) 駆動装置の回転子の速度を制御する方法を説明します。制御アルゴリズムは、基準速度を基準周波数に変換します。コントローラーは、一定の電圧対周波数比を維持しながら、基準周波数からゲート パルスを生成します。
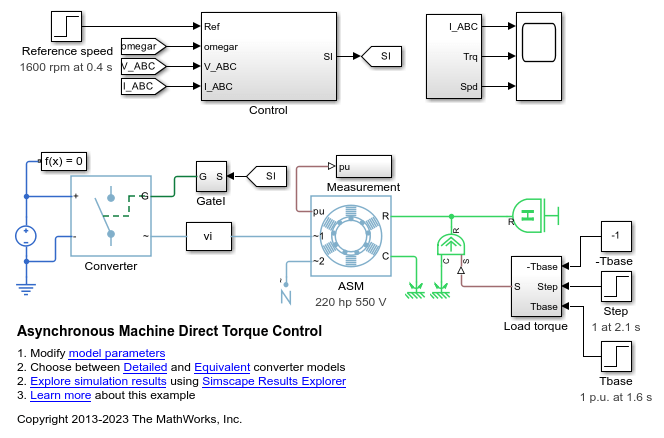
直接トルク制御法を使用した誘導機の速度の制御
この例では、直接トルク制御法を使用して非同期機 (ASM) を制御する方法を説明します。PI ベースの速度コントローラーはトルクの指令値を与えます。直接トルク コントローラーはインバーター パルスを生成します。
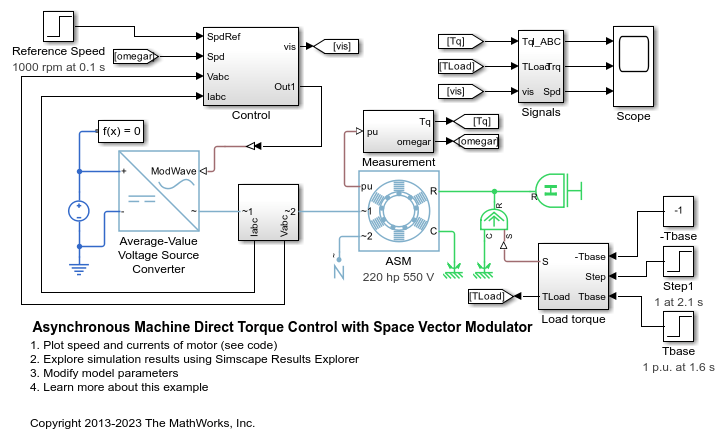
空間ベクトル変調器による非同期機の直接トルク制御
この例では、空間ベクトル変調器で直接トルク制御法を使用して非同期機 (ASM) を制御する方法を説明します。PI ベースの速度コントローラーはトルクの指令値を与えます。直接トルク コントローラーは、空間ベクトル変調器に必要な基準電圧を生成します。DC 電圧源は、制御された平均値電圧源コンバーターを通して ASM に電力を供給します。
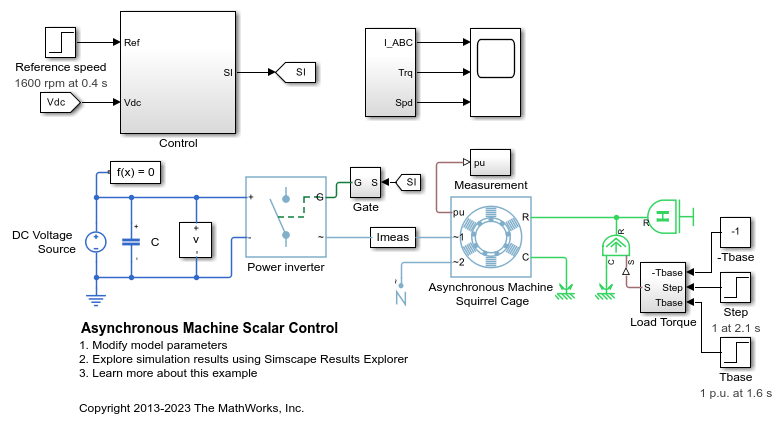
非同期機のスカラー制御
この例では、スカラー V/f 制御法を使用して非同期機 (ASM) 駆動装置の回転子の速度を制御する方法を説明します。コンバーターは、基準速度を基準電気周波数に変換します。コントローラーは、スカラー V/f 制御によって一定の電圧対周波数比を維持し、基準周波数から基準電圧を生成します。

BLDC ヒステリシス電流制御
この例では、BLDC をベースとする電気駆動装置において、ヒステリシス コントローラーを使用して電流を制御する方法を説明します。DC 電圧源は、制御された三相インバーターを通して BLDC に電力を供給します。電流要求の上昇がモーター コントローラーに対し指定されます。負荷トルクは、回転子の速度に二次的に依存します。Control サブシステムは、ヒステリシスベースの電流制御手法を実装します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

BLDC 位置制御
この例では、BLDC をベースとする電気駆動装置において回転子の角度を制御する方法を説明します。理想的なトルク源が負荷を提供します。Control サブシステムでは、外側の位置制御ループ、速度制御ループ、内側の電流制御ループという 3 つの制御ループをもつ PI ベース カスケード制御構造を使用します。BLDC には、制御された三相インバーターから電力が供給されます。インバーターのゲート信号は、ホール信号から取得されます。シミュレーションではステップ指令値を使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

BLDC 速度制御
この例では、BLDC をベースとする電気駆動装置において、回転子の速度を制御する方法を説明します。理想的なトルク源が負荷を提供します。Control サブシステムでは、外側の速度制御ループと内側の DC リンク電圧制御ループをもつ PI ベース カスケード制御構造を使用します。DC リンク電圧は、DC-DC 降圧コンバーターで調整されます。BLDC には、制御された三相インバーターから電力が供給されます。インバーターのゲート信号は、ホール信号から取得されます。シミュレーションでは速度のステップを使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

HESM トルク制御
この例では、ハイブリッド励磁同期機 (HESM) をベースとする電気牽引駆動装置において、トルクを制御する方法を説明します。永久磁石および励磁巻線が HESM を励磁します。高電圧バッテリーは、制御された固定子巻線用三相コンバーターと制御された回転子巻線用 4 象限チョッパーを通して SM に電力を供給します。理想的な角速度源が負荷を提供します。Control サブシステムは、トルク制御に開ループ アプローチを使用し、電流制御に閉ループ アプローチを使用します。各サンプル瞬時において、トルク要求は関連する指令電流に変換されます。電流制御は PI ベースです。シミュレーションでは、モーター モードと発電機モードの両方で、複数のトルク ステップを使用します。Visualization サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

HESM の速度制御
この例では、ハイブリッド励磁同期機 (HESM) をベースとする電気牽引駆動装置において、回転子の角速度を制御する方法を説明します。永久磁石および励磁巻線が HESM を励磁します。高電圧バッテリーは、制御された固定子巻線用三相コンバーターと制御された回転子巻線用 4 象限チョッパーを通して HESM に電力を供給します。理想的なトルク源が負荷を提供します。Control サブシステムには、マルチレートの PI ベース カスケード制御構造が含まれています。制御構造には、外側に 1 つの角速度制御ループがあり、内側に 3 つの電流制御ループがあります。Visualization サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

IPMSM トルク制御
この例では、埋込永久磁石同期機 (IPMSM) をベースとする自動車の電気牽引駆動装置において、トルクを制御する方法を説明します。高圧バッテリーは、制御された三相コンバーターを通して IPMSM に電力を供給します。IPMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的な角速度源が負荷を提供します。Control サブシステムは、IPMSM のトルク制御に開ループ アプローチを使用し、電流制御に閉ループ アプローチを使用します。各サンプル瞬時において、トルク要求は関連する指令電流に変換されます。電流制御は PI ベースであり、トルク制御に使用されるレートよりも速いサンプルレートを使用します。シミュレーションでは、モーター モードと発電機モードの両方で、複数のトルク ステップを使用します。タスク スケジューリングは Stateflow® で設計します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
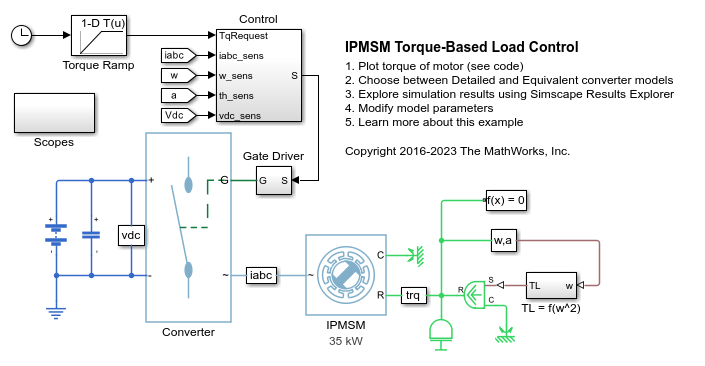
IPMSM のトルクベースの負荷制御
この例では、埋込永久磁石同期モーター (IPMSM) をベースとする駆動装置においてトルクを制御する方法を説明します。高圧バッテリーは、制御された三相インバーターを通して IPMSM に電力を供給します。トルク要求の上昇がモーター コントローラーに対して指定されます。負荷トルクは、回転子の速度に二次的に依存します。Control サブシステムは、IPMSM のトルク制御に開ループ アプローチを使用し、電流制御に閉ループ アプローチを使用します。各サンプル瞬時において、トルク要求は関連する指令電流に変換されます。電流制御は PI ベースであり、トルク制御に使用されるレートよりも速いサンプルレートを使用します。タスク スケジューリングは Stateflow® で設計します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

IPMSM の速度制御
この例では、埋込永久磁石同期機 (IPMSM) をベースとする自動車の電気牽引駆動装置において、回転子の角速度を制御する方法を説明します。高圧バッテリーは、制御された三相コンバーターを通して IPMSM に電力を供給します。IPMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的なトルク源が負荷を提供します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。Control サブシステムには、外側の角速度制御ループと内側の 2 つの電流制御ループをもつ、マルチレートの PI ベース カスケード制御構造が含まれています。Control サブシステムのタスク スケジューリングは、Stateflow® のステート マシンとして実装されます。1 秒間のシミュレーション中、角速度要求は 0 rpm、500 rpm、2000 rpm、3000 rpm になります。

PMSM の弱め界磁制御
この例では、永久磁石同期機 (PMSM) をベースとする電気牽引駆動装置において、定格速度を超える回転子の角速度を制御する方法を説明します。高圧バッテリーが、制御された三相コンバーターを通して PMSM に電力を供給します。Control サブシステムには、外側の角速度制御ループと内側の 2 つの電流制御ループをもつ、マルチレートの PI ベース カスケード制御構造が含まれています。速度コントローラーはトルク指令値を生成します。ゼロ d 軸コントローラーがこのトルク指令値を電流指令値に変換します。弱め界磁コントローラーが、定格速度を超える電圧制約を満たすように電流指令値を調整します。Stateflow® のステート マシンによって、Control サブシステムのタスク スケジューリングが実装されます。0.7 秒のシミュレーション中、角速度要求は 0 rpm から 4000 rpm に上昇します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

PMSM 位置制御
この例では、PMSM をベースとする電気駆動装置において回転子の位置を制御する方法を説明します。理想的なトルク源が負荷を提供します。Control サブシステムでは、外側の位置および速度制御ループと内側の電流制御ループという 2 つの制御ループをもつカスケード制御構造を使用します。推定器設計の状態には、電磁トルク、機械角速度、機械角度位置、外乱 (負荷トルク) があります。最適状態フィードバック型の線形 2 次制御器が、位置と速度を制御します。ルーエンバーガー オブサーバーが負荷を推定します。PI コントローラーが、内側の電流制御ループを実装します。制御された三相インバーターが PMSM に電力を供給します。シミュレーションではステップ指令値を使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

SM トルク制御
この例では、同期機 (SM) をベースとする電気牽引駆動装置において、トルクを制御する方法を説明します。高電圧バッテリーは、制御された固定子巻線用三相コンバーターと制御された回転子巻線用 4 象限チョッパーを通して SM に電力を供給します。理想的な角速度源が負荷を提供します。Control サブシステムは、トルク制御に開ループ アプローチを使用し、電流制御に閉ループ アプローチを使用します。各サンプル瞬時において、トルク要求は関連する指令電流に変換されます。電流制御は PI ベースです。シミュレーションでは、モーター モードと発電機モードの両方で、複数のトルク ステップを使用します。タスク スケジューリングは Stateflow® ステート マシンとして実装されます。Visualization サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

SM の速度制御
この例では、同期機 (SM) をベースとする電気牽引駆動装置において、回転子の角速度を制御する方法を説明します。高電圧バッテリーは、制御された固定子巻線用三相コンバーターと制御された回転子巻線用 4 象限チョッパーを通して SM に電力を供給します。理想的なトルク源が負荷を提供します。Control サブシステムには、外側の角速度制御ループと内側の 3 つの電流制御ループをもつ、マルチレートの PI ベース カスケード制御構造が含まれています。Control サブシステムのタスク スケジューリングは、Stateflow® のステート マシンとして実装されます。Visualization サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
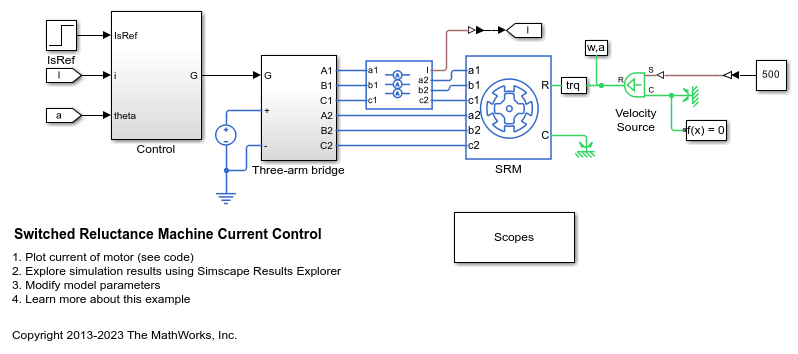
スイッチト リラクタンス機の電流制御
この例では、スイッチト リラクタンス機 (SRM) をベースとする電気駆動装置において、電流の大きさを制御する方法を説明します。DC 電圧源は、制御された 3 アーム ブリッジを通して SRM に電力を供給します。理想的な角速度源が負荷を提供します。コンバーターの点弧角と消弧角は一定に保たれます。PI ベースの電流コントローラーが電流の大きさを調整します。

スイッチト リラクタンス機の回転子速度の制御
この例では、スイッチト リラクタンス機 (SRM) をベースとする電気駆動装置において、回転子の速度を制御する方法を説明します。DC 電圧源は、制御された 3 アーム ブリッジを通して SRM に電力を供給します。正方向と逆方向の両方の回転を行うために、この例では速度エラーを使用して、コンバーターの点弧角と消弧角を調整しています。

同期機の状態空間制御
この例では、同期機 (SM) をベースとする牽引駆動装置において、状態空間制御を使用して電流を制御する方法を説明します。高電圧バッテリーが、制御された固定子巻線用三相コンバーターと制御された回転子巻線用 2 象限チョッパーを通して SM に電力を供給します。理想的な角速度源が負荷を提供します。SM はベース速度未満で動作します。各サンプル瞬時において、トルク要求は、ゼロ "d" 軸制御アプローチを使用して、関連する電流指令値に変換されます。状態フィードバック コントローラーが、回転子の基準フレームの電流を制御します。ルーエンバーガー オブサーバーが、速度に依存するフィードフォワードのプリ制御期間を取得します。シミュレーションでは、モーター モードと発電機モードの両方で、複数のトルク ステップを使用します。タスク スケジューリングは Stateflow® ステート マシンとして実装されます。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
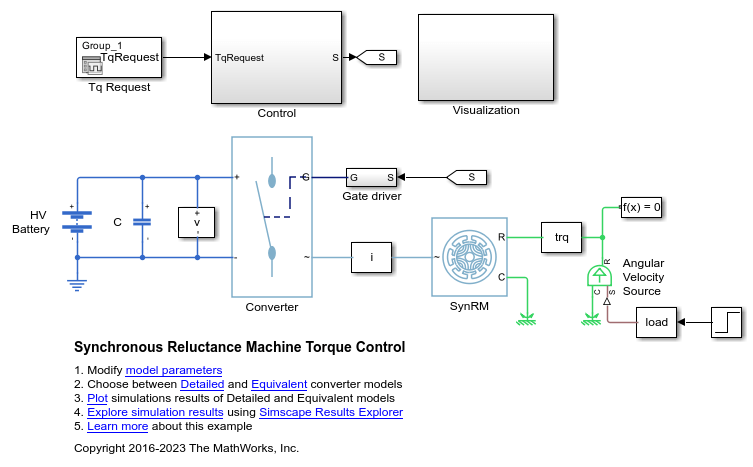
同期リラクタンス機のトルク制御
この例では、同期リラクタンス機 (SynRM) をベースとする電気駆動装置において、トルクを制御する方法を説明します。高電圧バッテリーは、制御された三相コンバーターを通して SynRM に電力を供給します。理想的な角速度源が負荷を提供します。Control サブシステムは、トルク制御に開ループ アプローチを使用し、電流制御に閉ループ アプローチを使用します。各サンプル瞬時において、トルク要求は、アンペアあたりの最大トルクの手法を使用して関連する指令電流に変換されます。電流制御は PI ベースです。シミュレーションでは、モーター モードと発電機モードの両方でトルク ステップを使用します。Visualization サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

同期リラクタンス機の速度制御
この例では、同期リラクタンス機 (SynRM) をベースとする電気駆動装置において、回転子の角速度を制御する方法を説明します。高電圧バッテリーは、制御された三相コンバーターを通して SynRM に電力を供給します。理想的なトルク源が負荷を提供します。Control サブシステムには、マルチレートの PI ベース カスケード制御構造が含まれています。制御構造には、外側に 1 つの角速度制限ループがあり、内側に 2 つの電流制御ループがあります。Visualization サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

センサー制御を使用した三相非同期ドライブ
この例では、センサー付き回転子ベクトル制御を使用して非同期機 (ASM) の操作の制御と解析を行う方法を説明します。このモデルには、メインの電気回路に加えて、制御、測定、スコープを含む 3 つの付加的サブシステムが表示されています。Controls サブシステムには 2 つのコントローラーが含まれています。1 つは送電系統側コンバーター (AC/DC) 用で、1 つはマシン側コンバーター (DC/AC) 用です。Scopes サブシステムには 2 つの時間スコープが含まれています。1 つは送電系統側コンバーター用で、1 つは ASM 用です。モデルが実行されるとスペクトル アナライザーが開き、A 相供給電流の周波数データが表示されます。

センサーなし制御を使用した三相非同期ドライブ
この例では、センサーなし回転子ベクトル制御を使用して非同期機 (ASM) の操作の制御と解析を行う方法を説明します。このモデルには、メインの電気回路に加えて、制御、測定、スコープを含む 3 つの付加的サブシステムが表示されています。Controls サブシステムには 2 つのコントローラーが含まれています。1 つは送電系統側コンバーター (AC/DC) 用で、1 つはマシン側コンバーター (DC/AC) 用です。Scopes サブシステムには 2 つの時間スコープが含まれています。1 つは送電系統側コンバーター用で、1 つは ASM 用です。モデルが実行されるとスペクトル アナライザーが開き、A 相供給電流の周波数データが表示されます。

三相 PMSM 駆動のモデル化
この例では、Y 結線およびデルタ結線構成内の永久磁石同期機 (PMSM) と、一般的なハイブリッド車両用にサイズ設定されたインバーターを説明します。インバーターは車両バッテリーに直接接続されていますが、中間に DC-DC コンバーター段階を実装することもできます。このモデルを使用して、望ましい性能を達成するためのアーキテクチャとゲインを選択することにより、PMSM コントローラーを設計します。IGBT をオンおよびオフにするタイミングをチェックするには、IGBT デバイスをより詳細な N-Channel IGBT ブロックに置き換えます。車両全体のモデル化には、Motor & Drive (System Level) ブロックを使用して、PMSM、インバーター、およびコントローラーを、エネルギーベースのモデルで抽象化します。
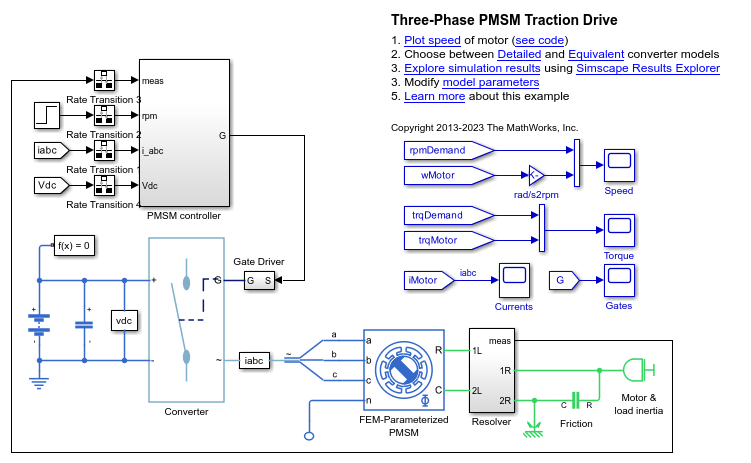
三相 PMSM 牽引駆動装置
この例では、永久磁石同期機 (PMSM) をベースとする電気牽引駆動装置において、回転子の速度を制御する方法を示します。高電圧バッテリーは、制御された三相コンバーターを通して FEM-Parameterized PMSM ブロックに電力を供給します。Rotational Friction ブロックが負荷を提供します。位置と速度の情報は、高忠実度レゾルバを使用して取得されます。PMSM controller サブシステムには、外側の速度制御ループと内側の 2 つの電流制御ループをもつカスケード制御構造が含まれています。0.25 秒のシミュレーションの間に、回転子の速度要求は 0 rpm から 1000 rpm まで上昇します。

三相同期機の制御
この例では、Synchronous Machine を制御および初期化する方法を示します。テスト回路は、発電機として使用される Synchronous Machine を示しています。端子電圧は AVR を使用して制御され、速度は調速機を使用して制御されます。
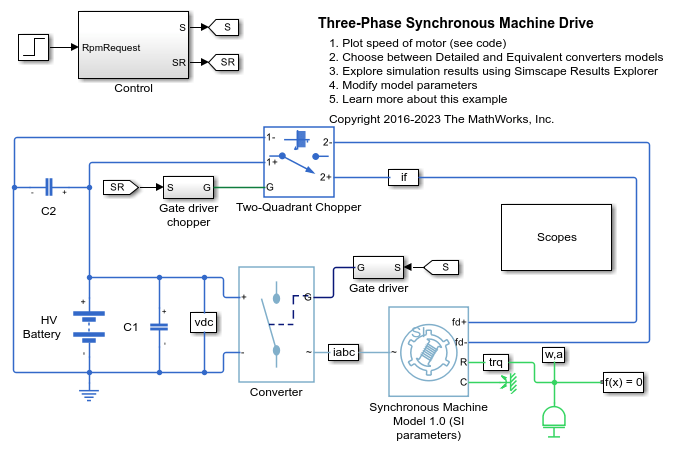
三相同期機駆動装置
この例では、同期機 (SM) をベースとする電気駆動装置において、回転子の速度を制御する方法を説明します。高電圧バッテリーが、制御された固定子巻線用三相コンバーターと制御された回転子巻線用 2 象限チョッパーを通して SM に電力を供給します。モデルを使用して SM コントローラーを設計し、アーキテクチャとゲインを選択して必要なパフォーマンスを達成します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

3 レベル コンバーターで電力供給される非同期機駆動装置でのトルク制御
この例では、非同期機 (ASM) をベースとする電気牽引駆動装置において、トルクを制御する方法を説明します。高圧バッテリーは、三相 3 レベル中性点クランプ型の制御されたコンバーターを通して ASM に電力を供給します。ASM は、モーター モードと発電機モードの両方で動作します。理想的な角速度源が負荷を提供します。Control サブシステムは、ベクトル制御の手法を使用して磁束とトルクを制御します。電流制御は PI ベースです。比例コントローラーが中性点の電圧を調整します。シミュレーションでは、モーター モードと発電機モードの両方で、複数のトルク ステップを使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

単相非同期機の直接トルク制御
この例では、単相非同期機 (ASM) をベースとする電気駆動装置において、直接トルク制御を使用して回転子の速度を制御する方法を説明します。理想的なトルク源が負荷を提供します。Control サブシステムはカスケード制御構造を使用します。外側の PI ベースの速度制御ループは、内側のループの直接トルク制御アルゴリズムに対し、トルクと磁束の指令値を提供します。単相 ASM は、H ブリッジによって電力を供給されます。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
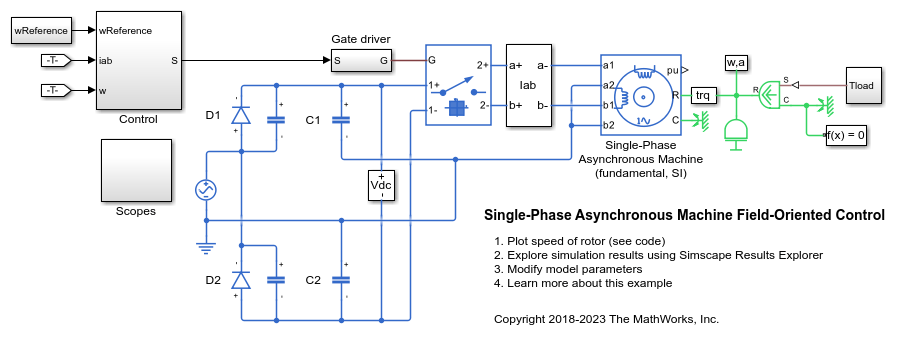
単相非同期機のベクトル制御
この例では、単相非同期機 (ASM) をベースとする電気駆動装置において、ベクトル制御を使用して回転子の速度を制御する方法を説明します。理想的なトルク源が負荷を提供します。Control サブシステムでは、外側の速度制御ループを 1 つと内側の電流制御ループを 2 つもつ PI ベース カスケード制御構造を使用します。単相 ASM は、H ブリッジによって電力を供給されます。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
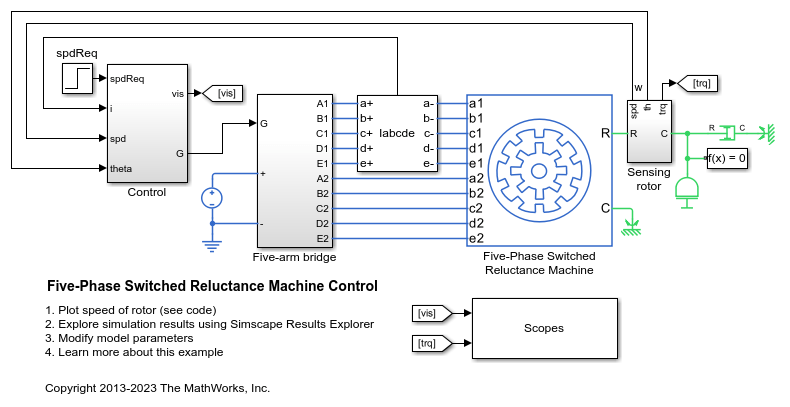
五相スイッチト リラクタンス機の制御
この例では、五相スイッチト リラクタンス機 (SRM) をベースとする電気駆動装置において、回転子の速度を制御する方法を説明します。DC 電圧源は、制御された 5 アーム ブリッジを通して SRM に電力を供給します。コンバーターの点弧角と消弧角は一定に保たれます。

四相スイッチト リラクタンス機の制御
この例では、四相スイッチト リラクタンス機 (SRM) をベースとする電気駆動装置において、回転子の速度を制御する方法を説明します。DC 電圧源は、制御された 4 アーム ブリッジを通して SRM に電力を供給します。コンバーターの点弧角と消弧角は一定に保たれます。
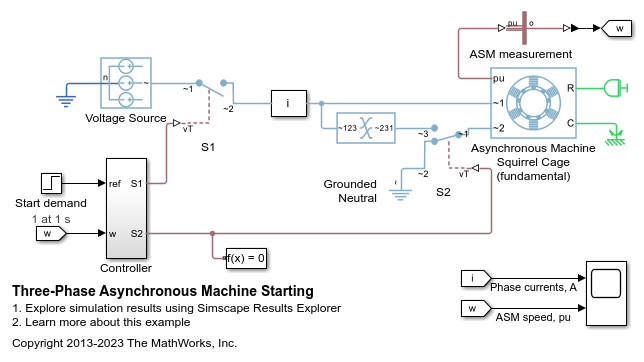
三相非同期機の起動
この例では、誘導機の Y-Δ 起動回路をモデル化する方法を示します。1 秒後、Controller サブシステムは S1 というラベルの付いたスイッチを閉じます。このスイッチを閉じると、電源がマシンに接続されます。初期状態では、S2 というラベルの付いたスイッチが ~1 端子の各相を ~2 端子の対応する相に接続し、~3 端子を未接続のままにするため、マシンは Y 構成で電源に接続します。マシンが同期速度の 80% に達すると、S2 は ~2 の各相を切断し、~1 の各相を ~3 の対応する相に接続することで、マシンを Δ 構成で再接続します。その後、モーターは回転子の速度に関係なく Δ 構成で動作します。モーターが Y 構成のとき、電源で見られるインピーダンスが高くなるため起動電流は減少し、接続されている他の負荷に対する乱れが少なくなります。
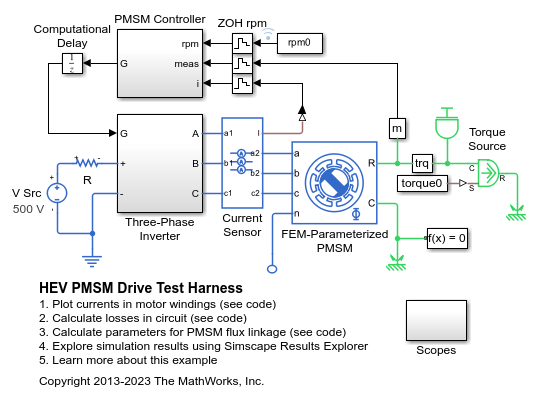
HEV PMSM 駆動のテスト ハーネス
この例では、一般的なハイブリッド車両での使用に適したサイズの、永久磁石同期電動機 (PMSM) 駆動のテスト ハーネスを示します。テスト ハーネスを使用して、与えられた速度とトルクで運転しているときの全体的な駆動損失を求めます。次に、このテスト ハーネスからの表形式の損失情報を Simscape™ Electrical™ Motor & Drive (システム レベル) ブロックで使用して、全体的なシステム効率の正確な予測を維持しつつ、ドライブ サイクル全体のラピッド シミュレーションを行うことができます。

BLDC の性能曲線の計算
この例では、ブラシレス DC (BLDC) モーターの性能曲線を計算する方法を説明します。シミュレーションには速度ランプが含まれます。理想的な台形変調波を使用して平均値コンバーターを駆動します。Triggered Subsystem を使用して、与えられた速度のピーク トルク、電力、電流、効率性の値を特定します。

単相 PMSM 制御
この例では、単相永久磁石同期モーター (SPPMSM) ドライブにおいて、回転子の速度を制御する方法を示します。DC 電圧源は、制御された H ブリッジを通して SPPMSM に電力を供給します。Control サブシステムは、速度制御手法を実装します。
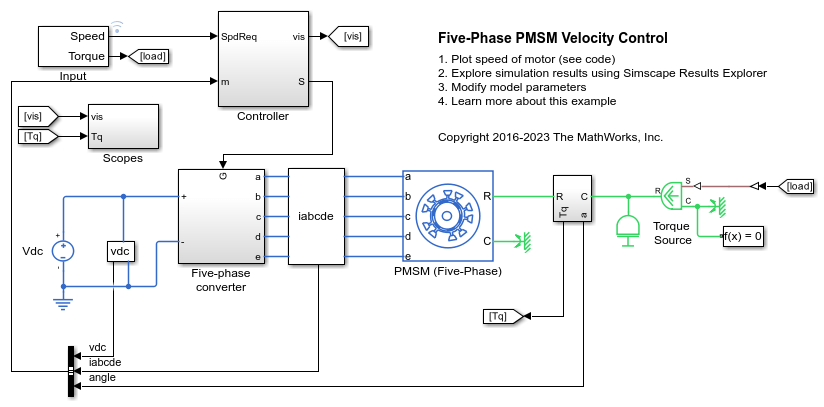
五相 PMSM の速度制御
この例では、五相永久磁石同期機 (PMSM) をベースとする電気牽引駆動装置において、回転子の角速度を制御する方法を説明します。DC 電圧源が、制御された五相コンバーターを通して PMSM に電力を供給します。PMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的なトルク源が負荷を提供します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。Control サブシステムには、外側の角速度制御ループと内側の 4 つの電流制御ループをもつ、PI ベース カスケード制御構造が含まれています。1 秒間のシミュレーション中、角速度要求は 0 rpm、500 rpm、2000 rpm、3000 rpm になります。
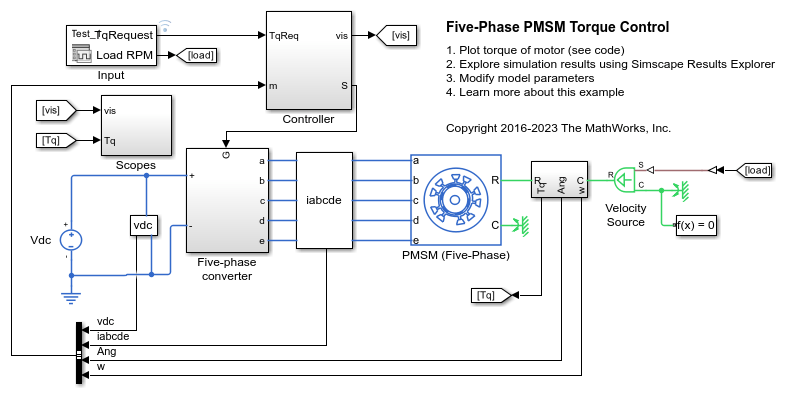
五相 PMSM のトルク制御
この例では、五相永久磁石同期機 (PMSM) をベースとする電気牽引駆動装置において、トルクを制御する方法を説明します。DC 電圧源が、制御された五相コンバーターを通して PMSM に電力を供給します。PMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的な角速度源が負荷を提供します。Control サブシステムは、PMSM のトルク制御に開ループ アプローチを使用し、電流制御に閉ループ アプローチを使用します。各サンプル瞬時において、トルク要求は関連する q 軸電流指令値に変換されます。電流制御は PI ベースです。シミュレーションでは、モーター モードと発電機モードの両方で、複数のトルク ステップを使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
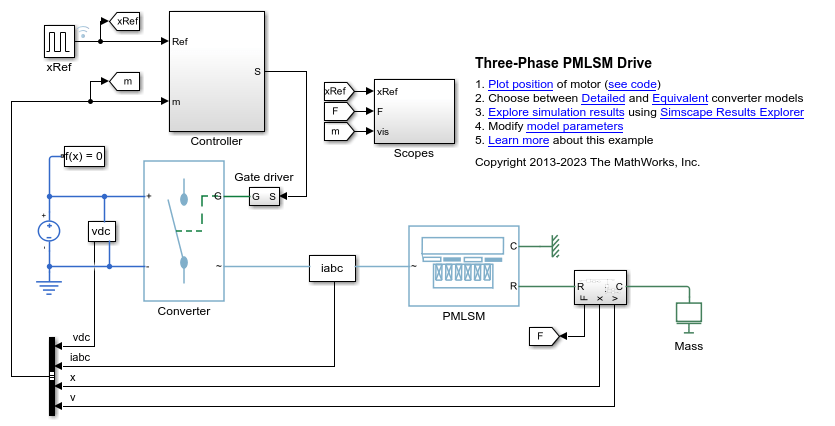
三相 PMLSM 駆動装置
この例では、三相永久磁石線形同期機 (PMLSM) 駆動装置内の位置を制御する方法を説明します。Control サブシステムでは、外側の位置制御ループ、速度制御ループ、内側の 2 つの電流制御ループをもつ PI ベース カスケード制御構造を使用します。制御された三相コンバーターが PMLSM に電力を供給します。シミュレーションではステップ指令値を使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
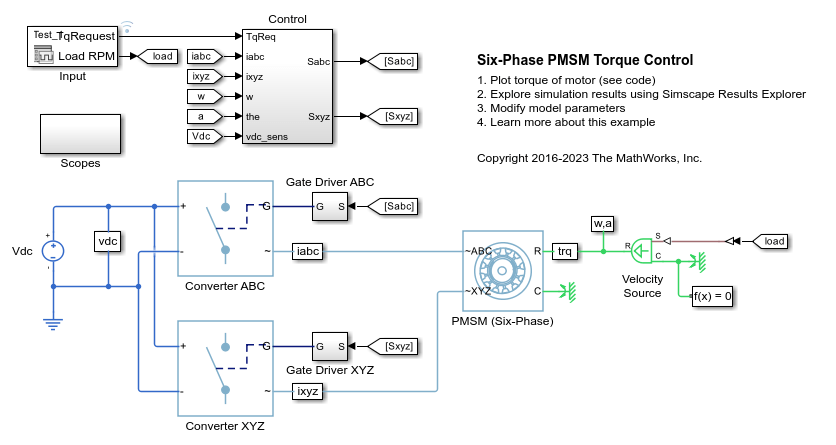
六相 PMSM のトルク制御
この例では、六相永久磁石同期機 (PMSM) をベースとする電気牽引駆動装置において、トルクを制御する方法を説明します。DC 電圧源は、2 台の制御された三相コンバーターを通して PMSM に電力を供給します。PMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的な角速度源が負荷を提供します。Control サブシステムは、トルク制御に開ループ アプローチを使用し、電流制御に閉ループ アプローチを使用します。各サンプル瞬時において、トルク要求は関連する "q" 軸電流指令値に変換されます。電流制御は PI ベースです。シミュレーションでは、モーター モードと発電機モードの両方で、複数のトルク ステップを使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
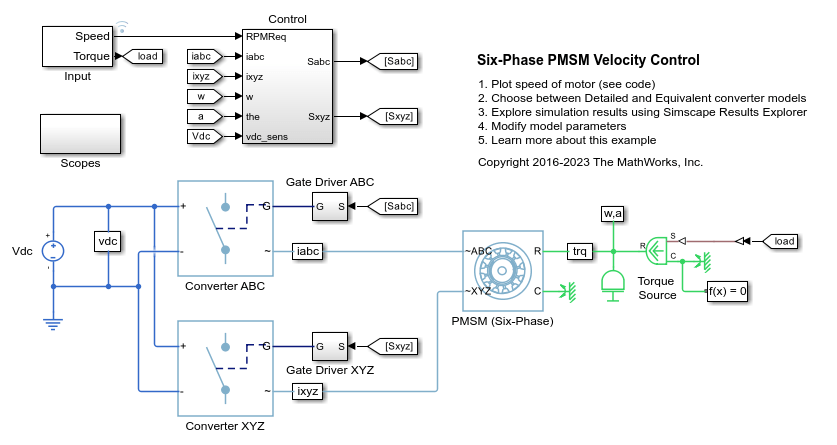
六相 PMSM の速度制御
この例では、六相永久磁石同期機 (PMSM) をベースとする電気牽引駆動装置において、回転子の角速度を制御する方法を説明します。DC 電圧源は、2 台の制御された三相コンバーターを通して PMSM に電力を供給します。PMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的なトルク源が負荷を提供します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。Control サブシステムには、外側の角速度制御ループと内側の 4 つの電流制御ループをもつ、PI ベース カスケード制御構造が含まれています。1 秒間のシミュレーション中、角速度要求は 0 rpm、500 rpm、2000 rpm、3000 rpm になります。

熱モデルをもつ BLDC の位置制御
この例では、BLDC をベースとする電気駆動装置において回転子の角度を制御する方法を説明します。BLDC には、熱モデルと経験的な鉄損が含まれています。理想的なトルク源が負荷を提供します。Control サブシステムでは、外側の位置制御ループ、回転数制御ループ、内側の電流制御ループという 3 つの制御ループをもつ PI ベース カスケード制御構造を使用します。BLDC には、制御された三相インバーターから電力が供給されます。インバーターのゲート信号は、ホール信号から取得されます。シミュレーションではステップ指令値を使用します。固定子巻線と回転子の初期温度は摂氏 25 度に設定されています。周囲温度は摂氏 27 度です。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
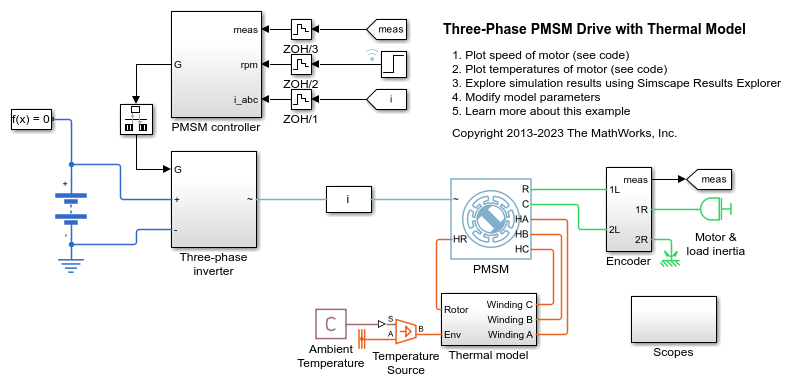
熱モデルをもつ三相 PMSM 駆動
この例では、一般的なハイブリッド車両用にサイズ設定された PMSM (永久磁石同期機) とインバーターについて説明します。PMSM には、熱モデルと経験的な鉄損が含まれています。インバーターは車両バッテリーに直接接続されていますが、中間に DC-DC コンバーター段階を実装することもできます。このモデルを使用すると、望ましい性能を達成するためのアーキテクチャとゲインを選択することにより、PMSM コントローラーを設計できます。固定子巻線と回転子の初期温度は摂氏 25 度に設定されています。周囲温度は摂氏 27 度です。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
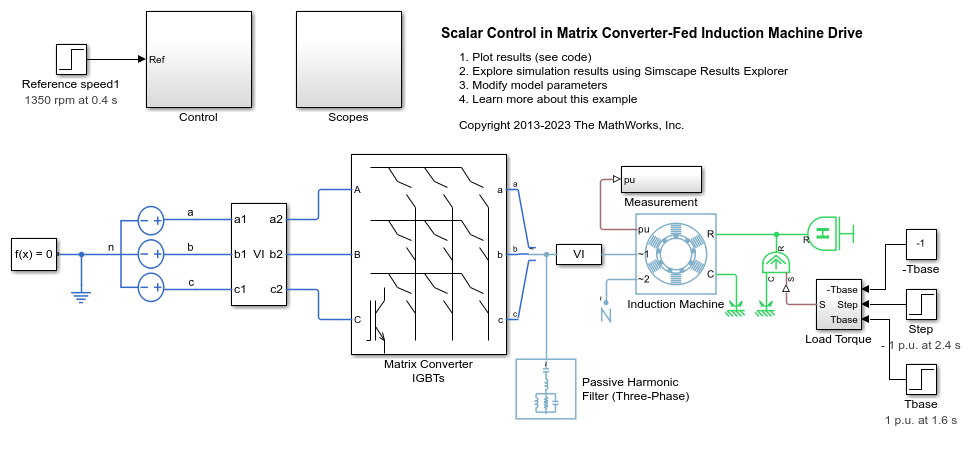
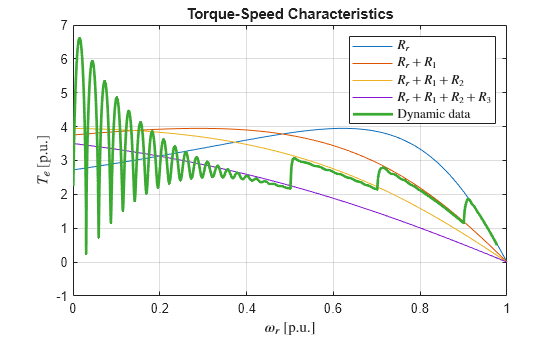
マトリックス コンバーターから給電される誘導機駆動装置のスカラー制御
この例では、スカラー V/f 制御法を使用して、マトリックス コンバーターから給電される誘導機駆動装置の回転子の回転数を制御する方法を説明します。基準周波数をもつ三相電圧を発生させるために、コントローラーはスカラー V/f 制御を使用して、一定の電圧対周波数比を維持します。振幅と周波数が固定された三相電圧源は、三相マトリックス コンバーター経由で誘導機に給電します。マトリックス コンバーターは、入力変位係数を 1 とした 3 次高調波注入 Venturini 変調を使用して制御されます。誘導機は、モーター モードと発電機モードの両方で動作します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
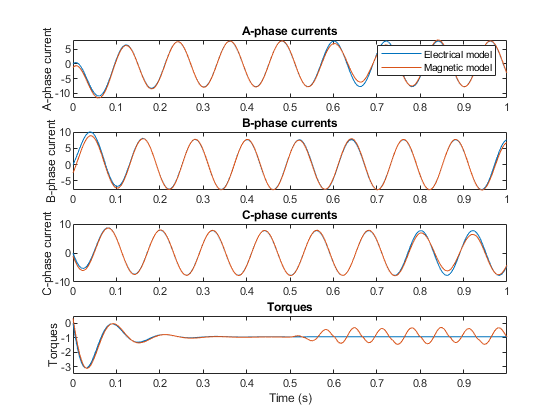
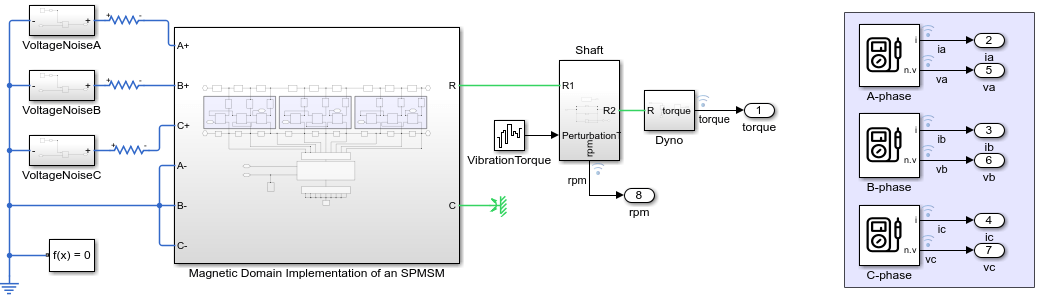
故障した PMSM のモデル化
この例では、Simscape™ Electrical™ を使用して故障した永久磁石同期モーター (PMSM) をモデル化する方法を説明します。一般的に、PMSM をモデル化するときには、各巻線を、関連するインダクタンス、誘起逆起電力 (EMF)、および隣接する巻線との相互誘導結合をもつ単一のエンティティとして表すことができます。しかし、巻線が故障した場合、単一エンティティの仮定が破綻します。結果のダイナミクスを正しく取得するには、巻線スロットのレベルでモーターをモデル化する必要があります。このためには、磁気ドメインでモデル化する必要があります。

四相 PMSM のトルク制御
この例では、四相永久磁石同期機 (PMSM) をベースとする電気牽引駆動装置において、トルクを制御する方法を説明します。DC 電圧源が、制御された四相コンバーターを通して PMSM に電力を供給します。PMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的な角速度源が負荷を提供します。Control サブシステムは、PMSM のトルク制御に開ループ アプローチを使用し、電流制御に閉ループ アプローチを使用します。各サンプル瞬時において、トルク要求は関連する q 軸電流指令値に変換されます。電流制御は PI ベースです。シミュレーションでは、モーター モードと発電機モードの両方で、複数のトルク ステップを使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

四相 PMSM の速度制御
この例では、四相永久磁石同期機 (PMSM) をベースとする電気牽引駆動装置において、回転子の角速度を制御する方法を説明します。DC 電圧源が、制御された四相コンバーターを通して PMSM に電力を供給します。PMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的なトルク源が負荷を提供します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。Control サブシステムには、外側の角速度制御ループと内側の 4 つの電流制御ループをもつ、PI ベース カスケード制御構造が含まれています。1 秒間のシミュレーション中、角速度要求は 0 rpm、500 rpm、2000 rpm、3000 rpm になります。

六相スイッチト リラクタンス機の制御
この例では、六相スイッチト リラクタンス機 (SRM) をベースとする電気駆動装置において、回転子の速度を制御する方法を説明します。DC 電圧源は、制御された 6 アーム ブリッジを通して SRM に電力を供給します。コンバーターの点弧角と消弧角は一定です。
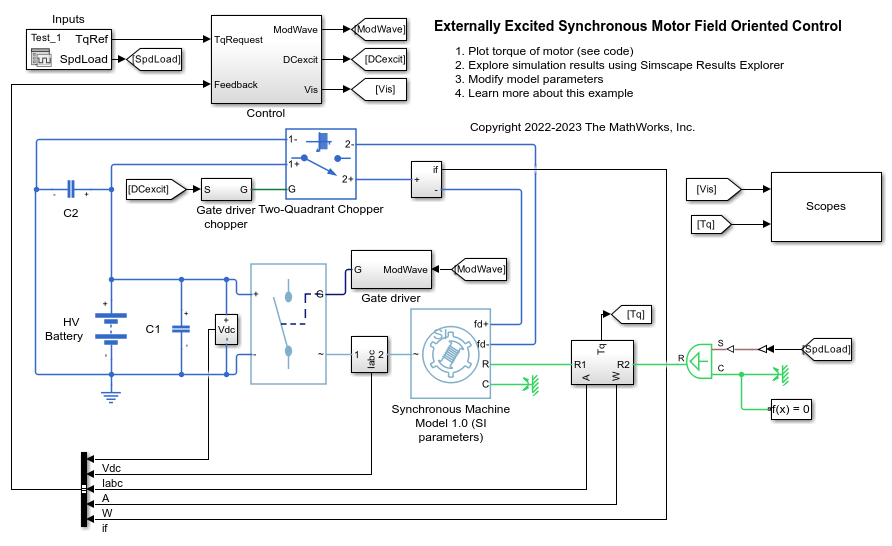
外部励起同期モーターのベクトル制御
この例では、外部励起同期モーター (SM) の駆動装置において、ベクトル制御を使用してトルクを制御する方法を説明します。高電圧バッテリーが、制御された固定子巻線用三相コンバーターと制御された回転子巻線用 2 象限チョッパーを通して SM に電力を供給します。いずれのコンバーターも、シミュレーションを高速化するために平均化スイッチと変調波形を使用して制御されます。この実装により、PWM 制御信号に簡単に切り替えることができます。d 軸、q 軸、および励磁の電流指令値がオフラインで生成され、3 次元ルックアップ テーブルを使用して実装されます。モデルを使用して SM 制御アルゴリズムを設計し、リアルタイムで評価します。コントローラーを組み込みマイクロコントローラーに展開するために、Motor Control Blockset™ ライブラリの最適化されたコントローラーを使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。

システムレベルの AC ドライブ
この例では、AC-DC Converter (Three-Phase) ブロックおよび Motor & Drive (System Level) ブロックを使用して、電気機械のシステムレベルの AC ドライブをモデル化する方法を説明します。AC-DC コンバーターは、一定の DC リンク電圧を提供する送電系統側コンバーターを表します。Motor & Drive ブロックは、DC-AC コンバーターを備えた汎用 AC 電気機械として動作します。このモデル化アプローチにより、パワー コンバーターのスイッチング イベントのない高速なシステムレベルのシミュレーションができます。

開放端の巻線をもつ四相 PMSM の速度制御
この例では、開放端の巻線をもつ四相永久磁石同期機 (PMSM) を使用する電気牽引駆動装置において、回転子の角速度を制御する方法を説明します。Open-End PMSM (Four-Phase) ブロックのソース コードを表示するには、ブロックをダブルクリックし、[説明] タブで [ソース コード] ハイパーリンクをクリックします。DC 電圧源は、2 台の制御された四相コンバーターを通して PMSM に電力を供給します。PMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的なトルク源が負荷を提供します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。Control サブシステムには、外側の角速度制御ループと内側の 4 つの電流制御ループをもつ、PI ベース カスケード制御構造が含まれています。1 秒間のシミュレーション中、角速度要求は 0 rpm、500 rpm、2000 rpm、3000 rpm になります。
Model Start-Up Control Strategy for Wound-Rotor Induction Motor
Design a start-up control strategy with a resistor for a wound-rotor induction model using a Simscape™ Electrical™ FEM-Parameterized Induction Machine (Wound Rotor) block.
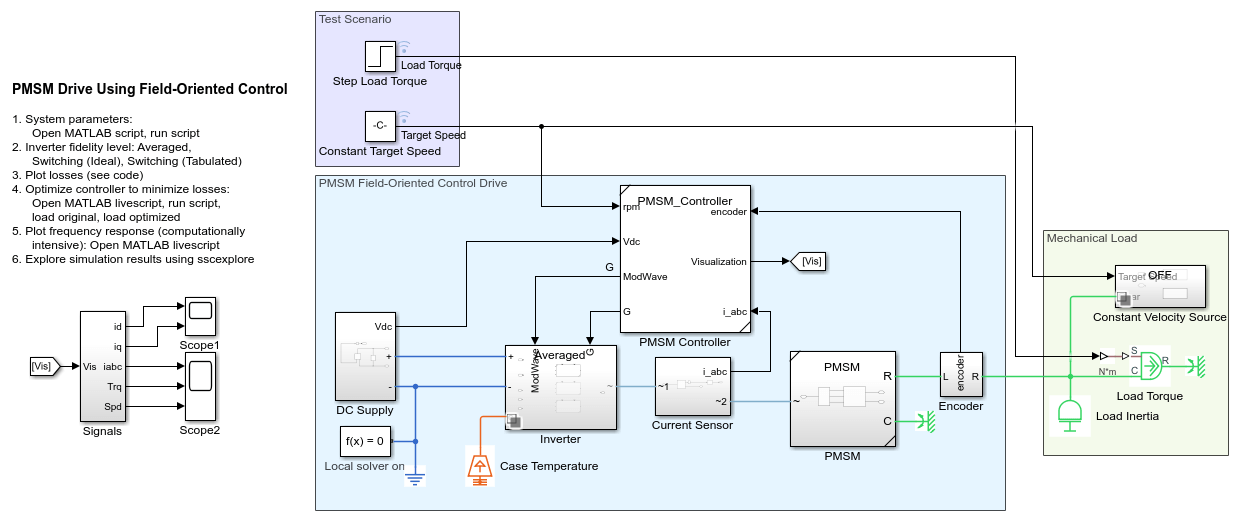
Improve Motor Efficiency with Optimized Control Parameters
Improve the efficiency of a permanent magnet synchronous motor (PMSM) drive using an optimal field-oriented controller (FOC). The FOC has been designed to minimize the motor losses. You can download this model in MATLAB® or access it from MATLAB Central File Exchange and GitHub®.