IPMSM のトルクベースの負荷制御
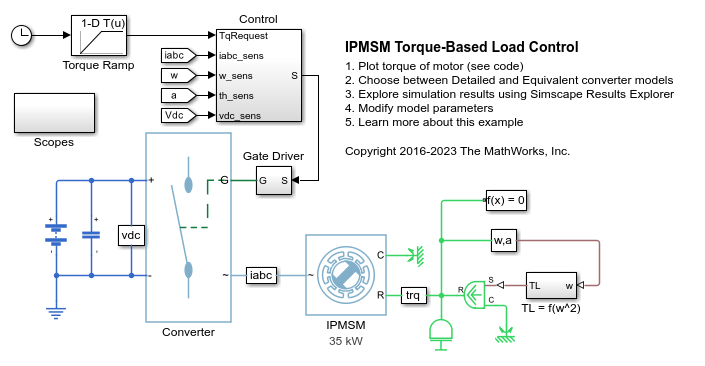
この例では、埋込永久磁石同期モーター (IPMSM) をベースとする駆動装置においてトルクを制御する方法を説明します。高圧バッテリーは、制御された三相インバーターを通して IPMSM に電力を供給します。トルク要求の上昇がモーター コントローラーに対して指定されます。負荷トルクは、回転子の速度に二次的に依存します。Control サブシステムは、IPMSM のトルク制御に開ループ アプローチを使用し、電流制御に閉ループ アプローチを使用します。各サンプル瞬時において、トルク要求は関連する指令電流に変換されます。電流制御は PI ベースであり、トルク制御に使用されるレートよりも速いサンプルレートを使用します。タスク スケジューリングは Stateflow® で設計します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
モデル
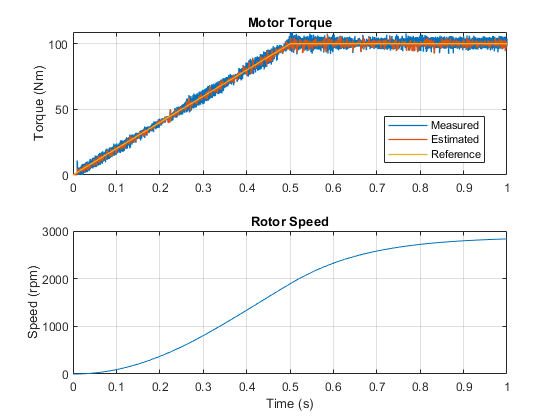
Simscape ログからのシミュレーション結果
以下のプロットは、テストでの要求トルクと測定トルク、および電気駆動装置の回転子速度を示しています。
参考
PMSM | Converter (Three-Phase)