外部励起同期モーターのベクトル制御
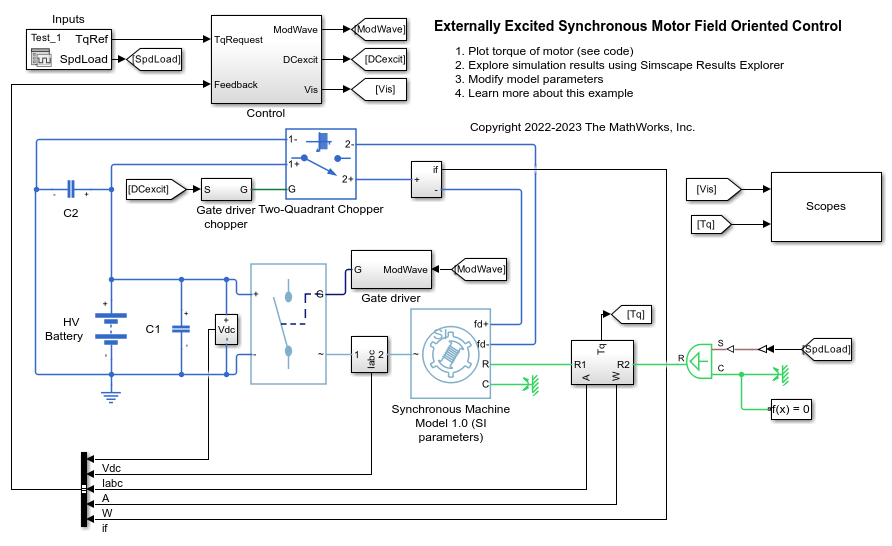
この例では、外部励起同期モーター (SM) の駆動装置において、ベクトル制御を使用してトルクを制御する方法を説明します。高電圧バッテリーが、制御された固定子巻線用三相コンバーターと制御された回転子巻線用 2 象限チョッパーを通して SM に電力を供給します。いずれのコンバーターも、シミュレーションを高速化するために平均化スイッチと変調波形を使用して制御されます。この実装により、PWM 制御信号に簡単に切り替えることができます。d 軸、q 軸、および励磁の電流指令値がオフラインで生成され、3 次元ルックアップ テーブルを使用して実装されます。モデルを使用して SM 制御アルゴリズムを設計し、リアルタイムで評価します。コントローラーを組み込みマイクロコントローラーに展開するために、Motor Control Blockset™ ライブラリの最適化されたコントローラーを使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
モデル
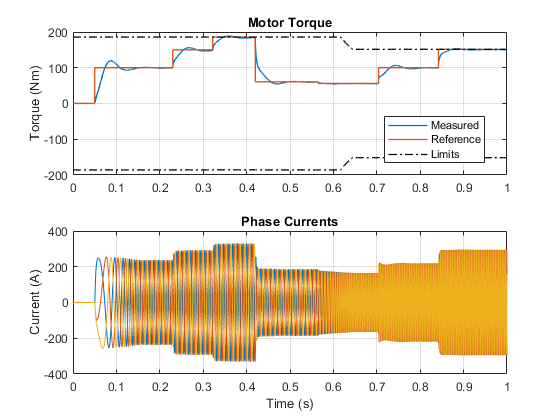
Simscape ログからのシミュレーション結果
以下のプロットは、テストで要求され、測定されたトルク、および電気駆動の相電流を示しています。
リアルタイム シミュレーションの結果
この例は、以下のプラットフォームでテストされました。
Intel® 3.5 GHz i7 マルチコア CPU と 4 GB の RAM を搭載した Speedgoat™ Performance リアルタイム ターゲット マシン。
3.5 GHz の Intel® Core XEON E3-1275v3 と 4 GB の RAM を搭載した dSPACE® SCALEXIO LabBox。
Simscape のローカル ソルバーを使用することで、このモデルを 100 マイクロ秒のステップ サイズでリアルタイム実行できます。サンプル レートが小さい場合、コールド キャッシュが原因で、最初のタスク実行中にタスク オーバーランが発生する可能性があります。このオーバーランを回避するには、選択したプラットフォームがこれらのオプションをサポートしている場合、タスク オーバーランの数を制限するか、リアルタイム アプリケーションの起動フェーズにおいてタスクのオーバーラン許容回数を制限するか、周期タスクのサンプル時間を延長することで、起動時の動作を緩和できます。
参考
Synchronous Machine Model 1.0 | Converter (Three-Phase) | Two-Quadrant Chopper