四相 PMSM のトルク制御
この例では、四相永久磁石同期機 (PMSM) をベースとする電気牽引駆動装置において、トルクを制御する方法を説明します。DC 電圧源が、制御された四相コンバーターを通して PMSM に電力を供給します。PMSM は、負荷に応じてモーター モードと発電機モードの両方で動作します。理想的な角速度源が負荷を提供します。Control サブシステムは、PMSM のトルク制御に開ループ アプローチを使用し、電流制御に閉ループ アプローチを使用します。各サンプル瞬時において、トルク要求は関連する q 軸電流指令値に変換されます。電流制御は PI ベースです。シミュレーションでは、モーター モードと発電機モードの両方で、複数のトルク ステップを使用します。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
モデル

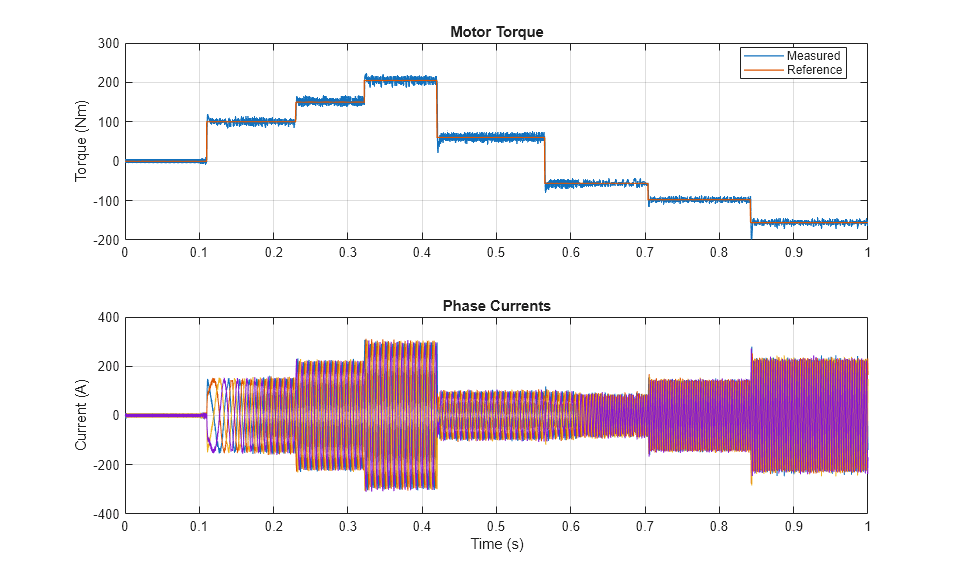
Simscape ログからのシミュレーション結果
以下のプロットは、テストで要求され、測定されたトルク、および電気駆動の相電流を示しています。