単相非同期機のベクトル制御
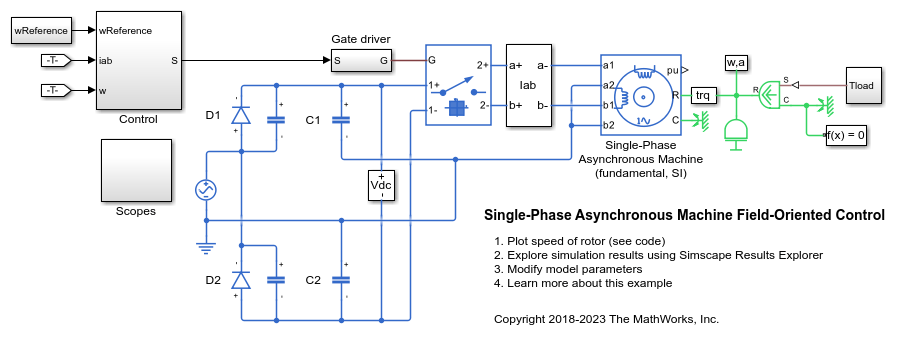
この例では、単相非同期機 (ASM) をベースとする電気駆動装置において、ベクトル制御を使用して回転子の速度を制御する方法を説明します。理想的なトルク源が負荷を提供します。Control サブシステムでは、外側の速度制御ループを 1 つと内側の電流制御ループを 2 つもつ PI ベース カスケード制御構造を使用します。単相 ASM は、H ブリッジによって電力を供給されます。Scopes サブシステムには、シミュレーション結果を確認できるスコープが含まれています。
モデル
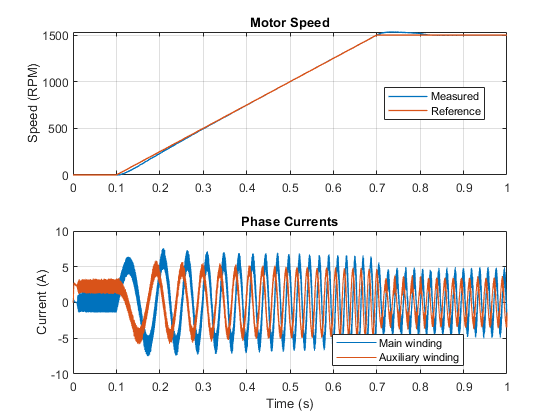
Simscape ログからのシミュレーション結果
以下のプロットは、テストで要求された速度と測定された速度、および電気駆動システムの相電流を示しています。
参考
Induction Machine (Single-Phase) | Induction Machine Field-Oriented Control (Single-Phase) | Four-Quadrant Chopper