計画と制御
Automated Driving Toolbox™ は、パス プランニングと車両制御をサポートする以下の機能を備えています。
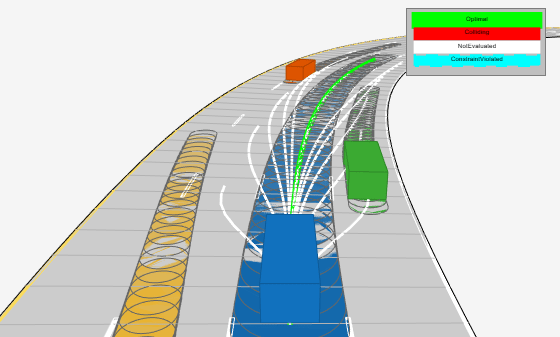
運転パスを計画するために、ビークル コストマップおよび最適な RRT* (Rapidly Exploring Random Tree) モーション プランニング アルゴリズムを使用できます。パスの有効性の検査、パスの平滑化、パスに沿った速度プロファイルの生成を行うこともできます。
車両制御システムを設計するために、自律型車両が計画された軌跡を追従できるようにする横方向コントローラーと縦方向コントローラーを使用できます。
車両コントローラーをテストするために、空気抵抗と、車軸間の重量配分を考慮した 3-DOF 剛体二輪モデルを使用できます。
関数
ブロック
| Path Smoother Spline | Smooth vehicle path using cubic spline interpolation |
| Velocity Profiler | Generate velocity profile of vehicle path given kinematic constraints |
| Lateral Controller Stanley | Stanley の手法を使用した、パス追従のための車両のステアリング角度の制御 |
| Longitudinal Controller Stanley | Stanley の手法を使用した、車両の縦方向速度の制御 |
| Bicycle Model | Implement a single track 3DOF rigid vehicle body to calculate longitudinal, lateral, and yaw motion |
トピック
- 横方向制御のチュートリアル
計画されたパスを追従する車両のステアリング角度を制御し、車線変更を実行します。
- Code Generation for Path Planning and Vehicle Control
Generate C++ code for a path planning and vehicle control algorithm, and verify the code using software-in-the-loop simulation.
注目の例

単眼カメラとセマンティック セグメンテーションを使用した占有グリッドの作成
セマンティック セグメンテーションと深層学習を使用して自由空間を推定し、占有グリッドを作成する

Traffic Light Negotiation
Design and test decision logic for negotiating a traffic light at an intersection.

Highway Lane Change Planner and Controller
Design and test the planner and controller components of a lane change maneuver system designed for highway driving.

Generate Code for Highway Lane Change Planner
Generate code for a highway lane change planner and validate the functional equivalence with simulation.

Automate Testing for Highway Lane Change
Automate the testing of the components and generated code for highway lane change application.
Highway Trajectory Planning Using Frenet Reference Path
Plan a local trajectory in a highway driving scenario by using a reference path in Frenet coordinates and a dynamic list of obstacles.
Object Tracking and Motion Planning Using Frenet Reference Path
Dynamically replan the motion of an autonomous vehicle based on the estimate of the surrounding environment. You use a Frenet reference path and a joint probabilistic data association (JPDA) tracker to estimate and predict the motion of other vehicles on the highway. Compared to the Highway Trajectory Planning Using Frenet Reference Path (Navigation Toolbox) example, you use these estimated trajectories from the multi-object tracker in this example instead of ground truth for motion planning.

Motion Planning in Urban Environments Using Dynamic Occupancy Grid Map
Perform dynamic replanning in an urban driving scene by using a grid-based tracker.

Generate Code for Highway Lane Following Controller
Generate code for the lane following decision logic and controller, and validate the functional equivalence by using software-in-the-loop (SIL) simulation.

Automate Testing for Highway Lane Following Controller
Automate the testing of a lane following controller and generated code for highway lane following application.

Truck Platooning Using Vehicle-to-Vehicle Communication
Simulate truck platooning application using V2V communication in Unreal Engine® simulation environment.

Truck Platooning with RoadRunner Scenario
Simulate truck platooning application, designed in Simulink®, with RoadRunner Scenario.

Path Planning Using 3D Lidar Map
Plan reference path for navigation of autonomous vehicle using normal distribution transform (NDT).

Lane-Level Path Planning with RoadRunner Scenario
Design a lane-level path planner in MATLAB® and cosimulate with RoadRunner Scenario.