driving.Path
計画された車両パス
説明
driving.Path オブジェクトは、一連のパス セグメントで構成される車両パスを表します。これらのセグメントは、driving.DubinsPathSegment オブジェクトか driving.ReedsSheppPathSegment オブジェクトのいずれかとなり、driving.Path の PathSegments プロパティに保存されます。
vehicleCostmap オブジェクトに対するパスの有効性を確認するには、関数 checkPathValidity を使用します。パスの長さに沿って姿勢を内挿するには、関数 interpolate を使用します。
作成
driving.Path オブジェクトを作成するには、関数 plan を使用し、pathPlannerRRT オブジェクトを入力として指定します。
プロパティ
オブジェクト関数
interpolate | 計画された車両パスに沿った姿勢の内挿 |
plot | Plot planned vehicle path |
例
最適な RRT* (Rapidly Exploring Random Tree) アルゴリズムを使用して駐車場の車両パスを計画します。パスが有効であることを確認してから、パスに沿って遷移する姿勢をプロットします。
駐車場のコストマップを読み込みます。コストマップをプロットし、駐車場、および車両が回避するインフレート エリアを確認します。
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)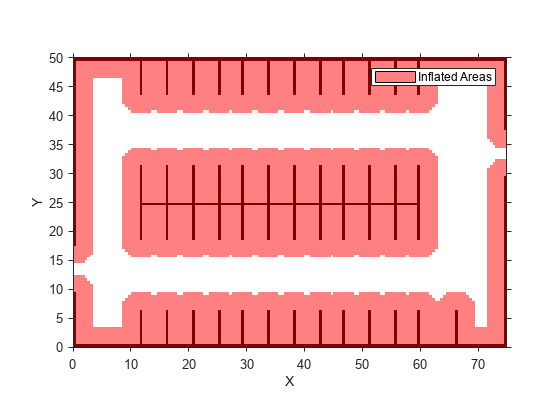
車両の開始姿勢とゴール姿勢を [x, y, Θ] ベクトルとして定義します。位置 (x,y) のワールド単位はメートルです。方向角度 Θ のワールド単位は度です。
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0];pathPlannerRRT オブジェクトを使用して、開始姿勢からゴール姿勢までのパスを計画します。
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
パスが有効か確認します。
isPathValid = checkPathValidity(refPath,costmap)
isPathValid = logical
1
パスに沿って遷移する姿勢を内挿します。
transitionPoses = interpolate(refPath);
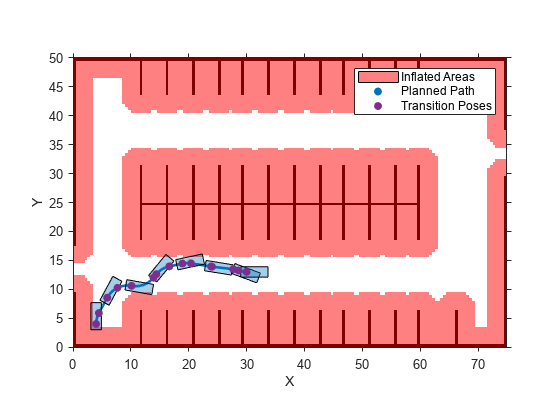
コストマップ上に計画されたパスと遷移する姿勢をプロットします。
hold on plot(refPath,'DisplayName','Planned Path') scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ... 'DisplayName','Transition Poses') hold off
Rapidly Exploring Random Tree (RRT*) アルゴリズムを使用して、駐車場の車両パスを計画します。パスに沿った複数の点に車両の姿勢を内挿します。
駐車場のコストマップを読み込みます。コストマップをプロットし、駐車場、および車両が回避するインフレート エリアを確認します。
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)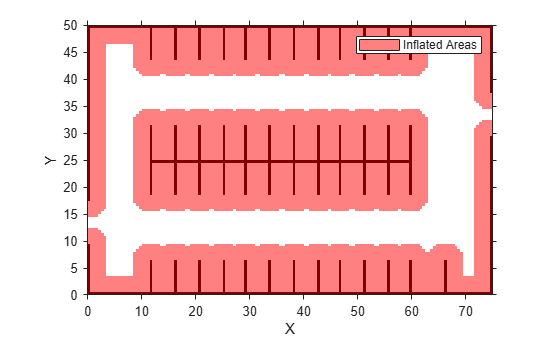
車両の開始姿勢とゴール姿勢を [x, y, Θ] ベクトルとして定義します。位置 (x,y) のワールド単位はメートルです。方向角度 Θ のワールド単位は度です。
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0]; pathPlannerRRTオブジェクトを使用して、開始姿勢からゴール姿勢までのパスを計画します。
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
パス全体に沿って 1 m ごとに車両姿勢を内挿します。
lengths = 0 : 1 : refPath.Length; poses = interpolate(refPath,lengths);
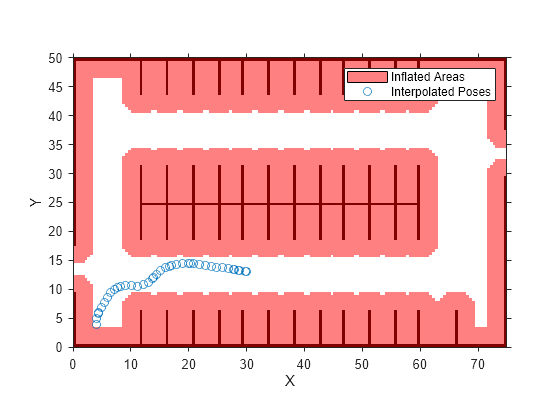
内挿した姿勢をコストマップ上にプロットします。
plot(costmap) hold on scatter(poses(:,1),poses(:,2),'DisplayName','Interpolated Poses') hold off