checkPathValidity
Check validity of planned vehicle path
Description
isValid = checkPathValidity(refPath,costmap)refPath, against
the vehicle costmap. Use this function to test if a path is valid within a changing
environment.
A path is valid if the following conditions are true:
The path has at least one pose.
The path is collision-free and within the limits of
costmap.
Examples
Plan a vehicle path through a parking lot by using the optimal rapidly exploring random tree (RRT*) algorithm. Check that the path is valid, and then plot the transition poses along the path.
Load a costmap of a parking lot. Plot the costmap to see the parking lot and inflated areas for the vehicle to avoid.
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)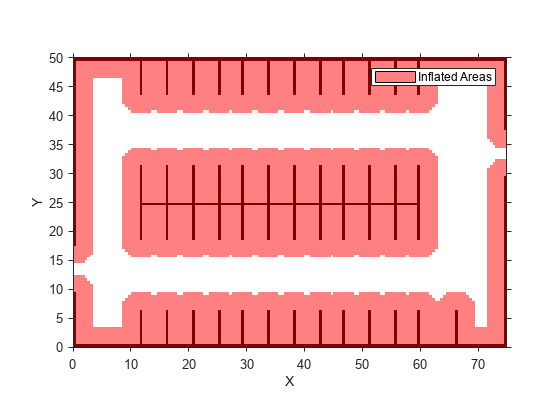
Define start and goal poses for the vehicle as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation angles are in degrees.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0];Use a pathPlannerRRT object to plan a path from the start pose to the goal pose.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Check that the path is valid.
isPathValid = checkPathValidity(refPath,costmap)
isPathValid = logical
1
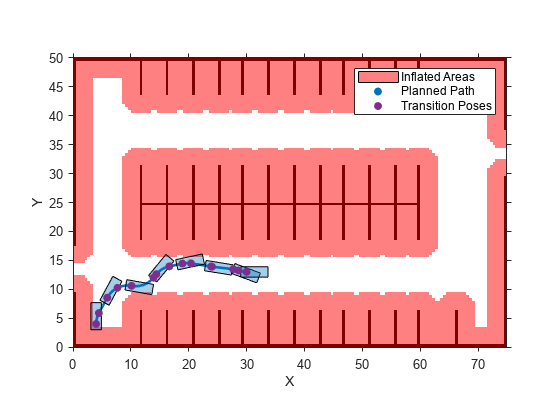
Interpolate the transition poses along the path.
transitionPoses = interpolate(refPath);
Plot the planned path and the transition poses on the costmap.
hold on plot(refPath,'DisplayName','Planned Path') scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ... 'DisplayName','Transition Poses') hold off
Input Arguments
Output Arguments
Algorithms
To check if a vehicle path is valid, the checkPathValidity function
discretizes the path. Then, the function checks that the poses at the discretized points
are collision-free. The threshold for a collision-free pose depends on the resolution at
which checkPathValidity discretizes.
Extended Capabilities
Version History
Introduced in R2018a