plan
RRT* パス プランナーを使用して車両パスを計画
説明
例
RRT* アルゴリズムを使用して駐車スポットへの車両パスを計画します。
駐車場のコストマップを読み込みます。コストマップをプロットし、駐車場、および車両が回避するインフレート エリアを確認します。
data = load('parkingLotCostmapReducedInflation.mat');
costmap = data.parkingLotCostmapReducedInflation;
plot(costmap)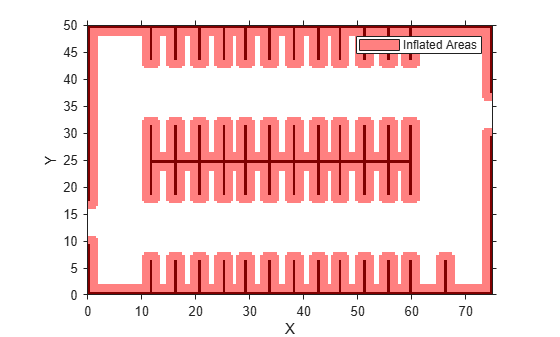
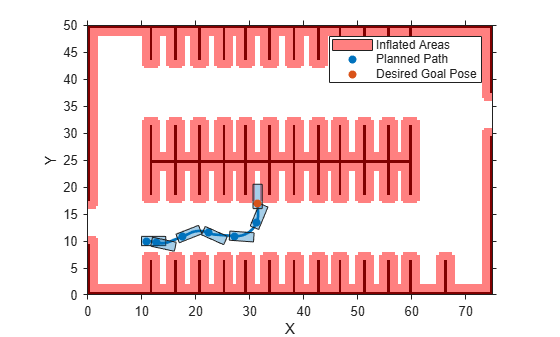
パス プランナーの開始姿勢とゴール姿勢を [x, y, Θ] ベクトルとして定義します。位置 (x,y) のワールド単位はメートルです。方向値 Θ のワールド単位は度です。
startPose = [11, 10, 0]; % [meters, meters, degrees]
goalPose = [31.5, 17, 90];RRT* パス プランナーを作成して、開始姿勢からゴール姿勢までのパスを計画します。
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
計画されたパスをプロットします。
plot(planner)
入力引数
出力引数
拡張機能
バージョン履歴
R2018a で導入