pathPlannerRRT
RRT* パス プランナーを構成
説明
pathPlannerRRT オブジェクトは、最適な RRT* (Rapidly Exploring Random Tree) アルゴリズムに基づいて車両パス プランナーを構成します。RRT* パス プランナーは、ランダムな衝突のない姿勢から成る木を作成して、車両の周囲の環境を探索します。
pathPlannerRRT オブジェクトを構成した後に、関数 plan を使用して開始姿勢からゴールまでのパスを計画します。
作成
説明
planner = pathPlannerRRT( は車両パスを計画するための costmap)pathPlannerRRT オブジェクトを返します。costmap は、車両の周囲の環境を指定する vehicleCostmap オブジェクトです。costmap は Costmap プロパティの値を設定します。
planner = pathPlannerRRT( は、1 つ以上の名前と値のペア引数を使用して、パス プランナーのプロパティを設定します。たとえば、costmap,Name,Value)pathPlanner(costmap,'GoalBias',0.5) は GoalBias プロパティを確率 0.5 に設定します。プロパティ名はそれぞれ引用符で囲みます。
プロパティ
例
RRT* アルゴリズムを使用して駐車スポットへの車両パスを計画します。
駐車場のコストマップを読み込みます。コストマップをプロットし、駐車場、および車両が回避するインフレート エリアを確認します。
data = load('parkingLotCostmapReducedInflation.mat');
costmap = data.parkingLotCostmapReducedInflation;
plot(costmap)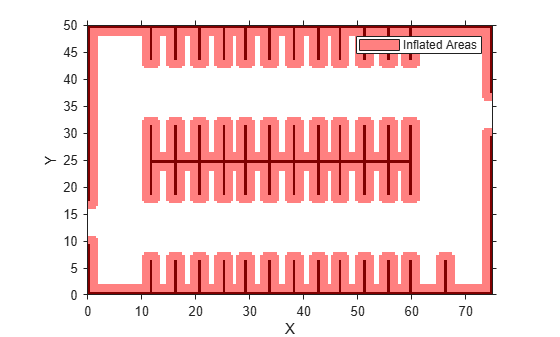
パス プランナーの開始姿勢とゴール姿勢を [x, y, Θ] ベクトルとして定義します。位置 (x,y) のワールド単位はメートルです。方向値 Θ のワールド単位は度です。
startPose = [11, 10, 0]; % [meters, meters, degrees]
goalPose = [31.5, 17, 90];RRT* パス プランナーを作成して、開始姿勢からゴール姿勢までのパスを計画します。
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
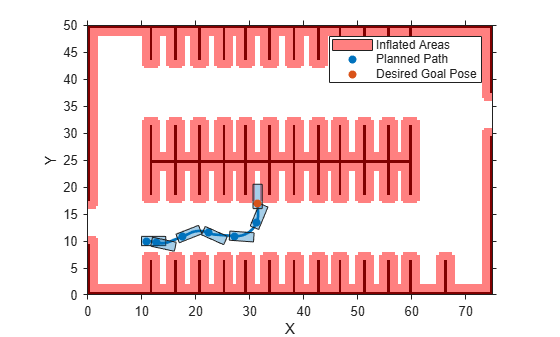
計画されたパスをプロットします。
plot(planner)
最適な RRT* (Rapidly Exploring Random Tree) アルゴリズムを使用して駐車場の車両パスを計画します。パスが有効であることを確認してから、パスに沿って遷移する姿勢をプロットします。
駐車場のコストマップを読み込みます。コストマップをプロットし、駐車場、および車両が回避するインフレート エリアを確認します。
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)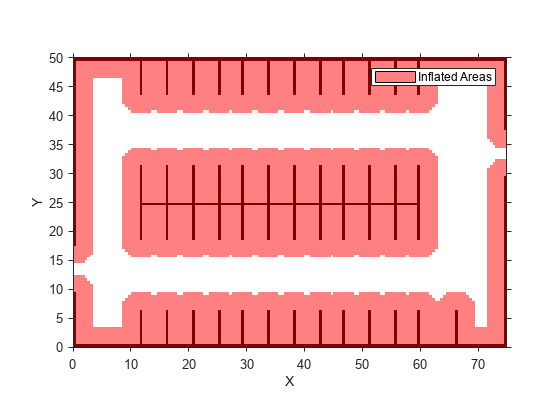
車両の開始姿勢とゴール姿勢を [x, y, Θ] ベクトルとして定義します。位置 (x,y) のワールド単位はメートルです。方向角度 Θ のワールド単位は度です。
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0];pathPlannerRRT オブジェクトを使用して、開始姿勢からゴール姿勢までのパスを計画します。
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
パスが有効か確認します。
isPathValid = checkPathValidity(refPath,costmap)
isPathValid = logical
1
パスに沿って遷移する姿勢を内挿します。
transitionPoses = interpolate(refPath);
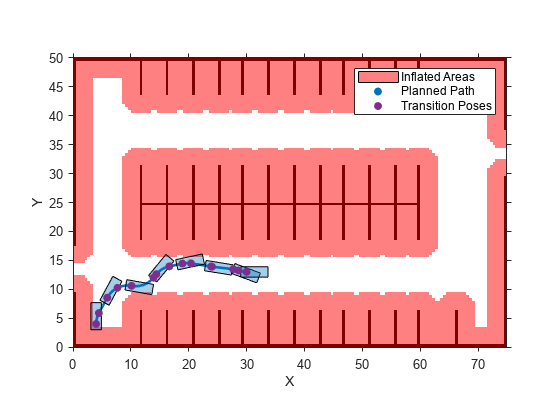
コストマップ上に計画されたパスと遷移する姿勢をプロットします。
hold on plot(refPath,'DisplayName','Planned Path') scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ... 'DisplayName','Transition Poses') hold off
ヒント
プランナーのプロパティのいずれかを更新すると、計画されたパスは
pathPlannerRRTからクリアされます。plotを呼び出した場合、planを使用してパスが計画されるまで、コストマップのみが表示されます。パフォーマンスを向上させるために、
pathPlannerRRTオブジェクトは近似最近傍探索を使用します。この探索手法では、sqrt(N)ノードのみが検査されます。ここで、Nは探索するノード数です。正確な最近傍探索を使用するには、ApproximateSearchプロパティをfalseに設定します。Dubins および Reeds-Shepp 接続手法は運動学的に実行可能であると見なされ、慣性の効果は無視されます。これらの手法を利用したパス プランナーは、車輪力の慣性の効果が小さい低速環境に適しています。
参照
[1] Karaman, Sertac, and Emilio Frazzoli. "Optimal Kinodynamic Motion Planning Using Incremental Sampling-Based Methods." 49th IEEE Conference on Decision and Control (CDC). 2010.
[2] Shkel, Andrei M., and Vladimir Lumelsky. "Classification of the Dubins Set." Robotics and Autonomous Systems. Vol. 34, Number 4, 2001, pp. 179–202.
[3] Reeds, J. A., and L. A. Shepp. "Optimal paths for a car that goes both forwards and backwards." Pacific Journal of Mathematics. Vol. 145, Number 2, 1990, pp. 367–393.
拡張機能
バージョン履歴
R2018a で導入