Lateral Controller Stanley
Stanley の手法を使用した、パス追従のための車両のステアリング角度の制御
ライブラリ:
Automated Driving Toolbox /
Vehicle Control
説明
Lateral Controller Stanley ブロックは、車両の現在の速度と方向が与えられたときに、車両の現在の姿勢が参照姿勢に一致するように調整するステアリング角度コマンドを度単位で計算します。コントローラーは、このコマンドの計算に Stanley の手法[1]を使用します。この制御速は、運動学的二輪モデルと動的二輪モデルの両方に基づきます。モデルを切り替えるには、[車両モデル] パラメーターを使用します。
運動学的二輪モデルは、駐車場など、慣性の影響が最小の低速環境におけるパス追従に適しています。
動的二輪モデルは、ハイウェイなど、慣性の影響がより顕著な高速環境におけるパス追従に適しています。この車両モデルは、車両のダイナミクスを記述する追加のパラメーターを提供します。
例
横方向制御のチュートリアル
計画されたパスを追従する車両のステアリング角度を制御し、車線変更を実行します。

Simulink での自動バレー パーキング
Automated Driving Toolbox™ を使用して Simulink® で自動バレー パーキング システムを構築します。
端子
入力
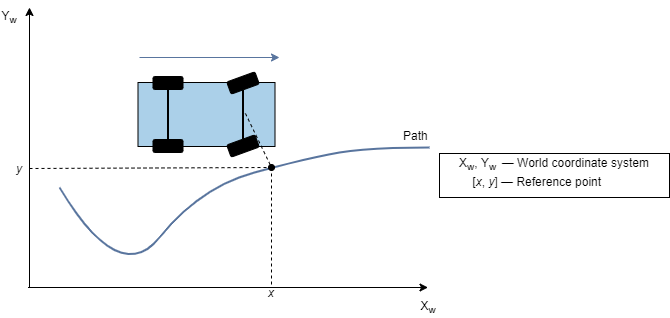
参照姿勢。[x, y, Θ] ベクトルとして指定します。x と y の単位はメートル、Θ の単位は度です。
x と y は、車両の進行方向の基準点を指定します。Θ はこの基準点におけるパスの方向角度を指定し、反時計回りの方向が正です。
前進運動の車両の場合、この基準点は車両の前車軸の中心に最も近いパス上の点です。
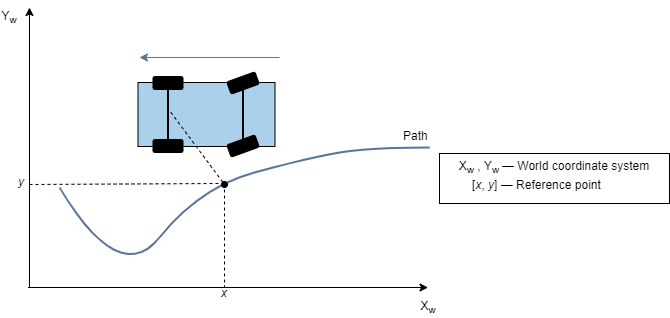
後退運動の車両の場合、この基準点は車両の後車軸の中心に最も近いパス上の点です。
データ型: single | double
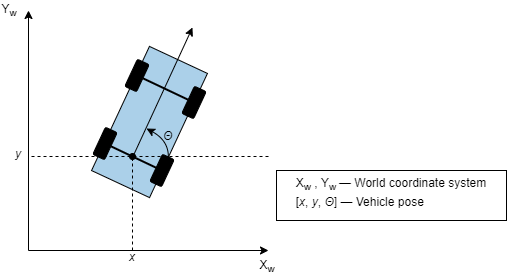
車両の現在の姿勢。[x, y, Θ] ベクトルとして指定します。x と y の単位はメートル、Θ の単位は度です。
x と y は、車両の位値を指定します。これは、車両の後車軸の中心として定義されます。
Θ は、位置 (x、y) における車両の方向角度を指定し、反時計回りの方向が正です。
車両の姿勢の詳細については、Automated Driving Toolbox の座標系を参照してください。
データ型: single | double
車両の現在の縦方向の速度。実数スカラーとして指定します。単位はメートル/秒です。
前進運動の車両の場合、この値は 0 より大きくなければなりません。
後退運動の車両の場合、この値は 0 より小さくなければなりません。
値 0 は、車両が運動していないことを表します。
データ型: single | double
車両の走行方向。前進運動は 1、後退運動は -1 として指定します。走行方向により、ステアリング角度コマンドの計算に使用される位置誤差と角度誤差が決まります。詳細については、アルゴリズムを参照してください。
基準点におけるパスの曲率 (ラジアン/m)。実数スカラーとして指定します。
前進運動の車両の場合、この基準点は車両の前車軸の中心に最も近いパス上の点です。
後退運動の車両の場合、この基準点は車両の後車軸の中心に最も近いパス上の点です。
パスの曲率は、Path Smoother Spline ブロックの Curvatures 出力端子から取得できます。また、車線境界線の曲率も、Scenario Reader ブロックの車線境界線の出力構造体から取得できます。
依存関係
この端子を有効にするには、[車両モデル] を [動的二輪モデル] に設定します。
車両の現在のヨー レート (度/秒)。実数スカラーとして指定します。現在のヨー レートは、車両の角速度の変化率です。
依存関係
この端子を有効にするには、[車両モデル] を [動的二輪モデル] に設定します。
車両の現在のステアリング角度 (度単位)。実数スカラーとして指定します。この値は、反時計回りの方向が正です。
詳細については、Automated Driving Toolbox の座標系を参照してください。
依存関係
この端子を有効にするには、[車両モデル] を [動的二輪モデル] に設定します。
出力
ステアリング角度コマンド (度単位)。実数スカラーとして返されます。この値は、反時計回りの方向が正です。
詳細については、Automated Driving Toolbox の座標系を参照してください。
パラメーター
ヒント
車両環境の変更に応じて、二輪モデルを切り替えることができます。バリアント サブシステムに 2 つの Lateral Controller Stanley ブロックを追加して、各ブロックに異なる二輪モデルを指定します。例については、横方向制御のチュートリアルを参照してください。
アルゴリズム
ステアリング角度コマンドを計算するために、コントローラーは参照姿勢を基準とする現在の姿勢の位置誤差と角度誤差を最小にします。車両の走行方向によってこれらの誤差の値が決まります。
車両が前進運動している場合 ([方向] パラメーターが 1 の場合) は次のとおりです。
"位置誤差" は、車両の前車軸の中心からパス上の基準点までの横方向の距離です。
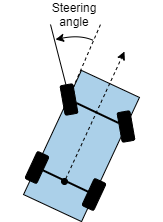
"角度誤差" は、参照パスを基準とした前輪の角度です。
車両が後退運動している場合 ([方向] パラメーターが -1 の場合) は次のとおりです。
"位置誤差" は、車両の後車軸の中心からパス上の基準点までの横方向の距離です。
"角度誤差" は、参照パスを基準とした後輪の角度です。
運動学的二輪モデルと動的二輪モデルについて、コントローラーがこれらの誤差を最小にする方法の詳細については、[1]を参照してください。
参照
[1] Hoffmann, Gabriel M., Claire J. Tomlin, Michael Montemerlo, and Sebastian Thrun. "Autonomous Automobile Trajectory Tracking for Off-Road Driving: Controller Design, Experimental Validation and Racing." American Control Conference. 2007, pp. 2296–2301. doi:10.1109/ACC.2007.4282788
拡張機能
バージョン履歴
R2018b で導入