interpolate
計画された車両パスに沿った姿勢の内挿
構文
説明
例
最適な RRT* (Rapidly Exploring Random Tree) アルゴリズムを使用して駐車場の車両パスを計画します。パスが有効であることを確認してから、パスに沿って遷移する姿勢をプロットします。
駐車場のコストマップを読み込みます。コストマップをプロットし、駐車場、および車両が回避するインフレート エリアを確認します。
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)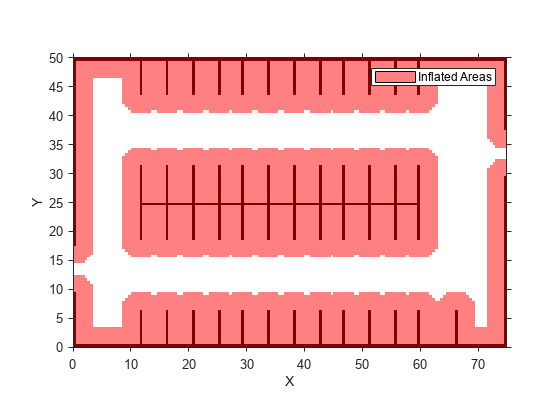
車両の開始姿勢とゴール姿勢を [x, y, Θ] ベクトルとして定義します。位置 (x,y) のワールド単位はメートルです。方向角度 Θ のワールド単位は度です。
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0];pathPlannerRRT オブジェクトを使用して、開始姿勢からゴール姿勢までのパスを計画します。
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
パスが有効か確認します。
isPathValid = checkPathValidity(refPath,costmap)
isPathValid = logical
1
パスに沿って遷移する姿勢を内挿します。
transitionPoses = interpolate(refPath);
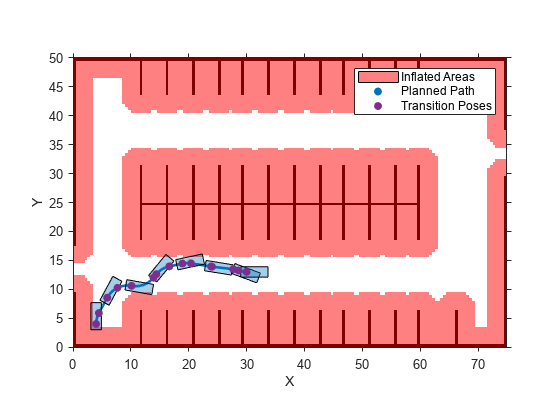
コストマップ上に計画されたパスと遷移する姿勢をプロットします。
hold on plot(refPath,'DisplayName','Planned Path') scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ... 'DisplayName','Transition Poses') hold off
Rapidly Exploring Random Tree (RRT*) アルゴリズムを使用して、駐車場の車両パスを計画します。パスに沿った複数の点に車両の姿勢を内挿します。
駐車場のコストマップを読み込みます。コストマップをプロットし、駐車場、および車両が回避するインフレート エリアを確認します。
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)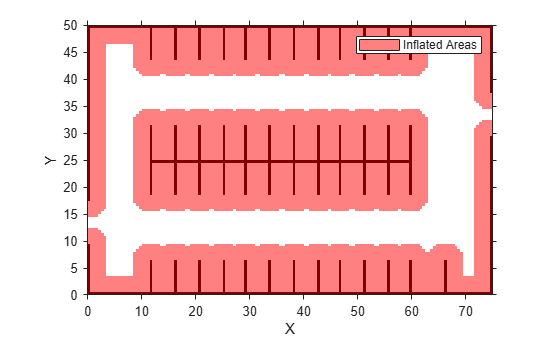
車両の開始姿勢とゴール姿勢を [x, y, Θ] ベクトルとして定義します。位置 (x,y) のワールド単位はメートルです。方向角度 Θ のワールド単位は度です。
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0]; pathPlannerRRTオブジェクトを使用して、開始姿勢からゴール姿勢までのパスを計画します。
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
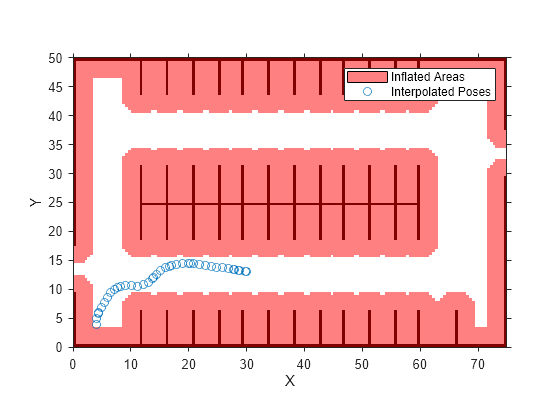
パス全体に沿って 1 m ごとに車両姿勢を内挿します。
lengths = 0 : 1 : refPath.Length; poses = interpolate(refPath,lengths);
内挿した姿勢をコストマップ上にプロットします。
plot(costmap) hold on scatter(poses(:,1),poses(:,2),'DisplayName','Interpolated Poses') hold off
入力引数
出力引数
詳細
パスは、運動 (左折、直進、右折など) の組み合わせからなる複数のセグメントで構成されます。"遷移する姿勢" とは、ある運動の終了と別の運動の開始に対応する車両姿勢です。これらは、車両の方向または向きの変化に対応するパスに沿った点を表します。関数 interpolate は、パスに沿って指定された点にのみ姿勢を内挿する場合でも、遷移する姿勢を常に返します。
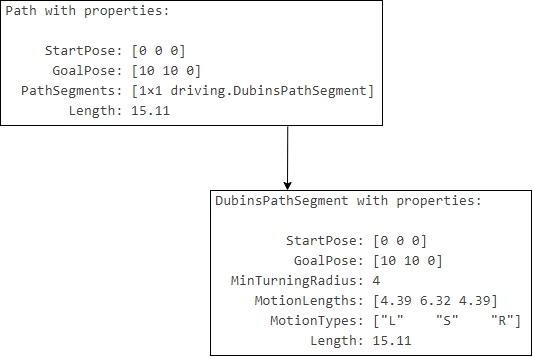
遷移する姿勢間のパスの長さは、パス セグメントの MotionLengths プロパティで指定されます。たとえば、次のパスを考えます。これは単一の Dubins パス セグメントで構成される driving.Path オブジェクトです。このセグメントは、セグメントの MotionLengths プロパティと MotionTypes プロパティで記述されるように、3 つの運動で構成されています。
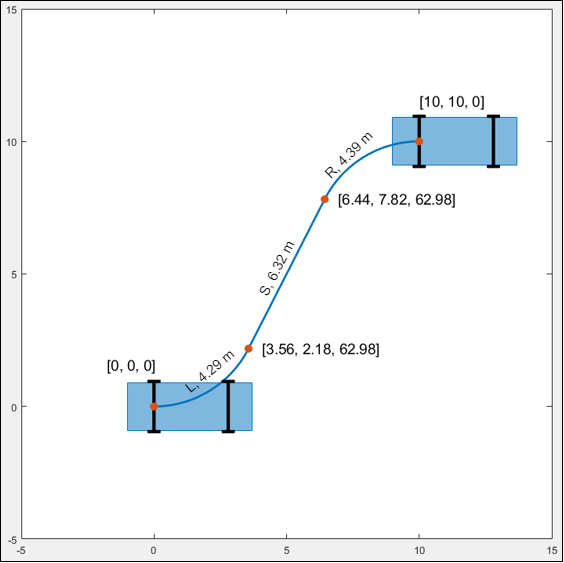
関数 interpolate は、次の遷移する姿勢を次の順序で内挿します。
車両の初期姿勢
StartPose。車両が最大ステアリング角度で 4.39 メートル左折 (
"L") した後の姿勢。車両が 6.32 メートル直進 (
"S") した後の姿勢。車両が最大ステアリング角度で 4.39 メートル右折 (
"R") した後の姿勢。これはパス全体の最後の姿勢であるため、この姿勢はゴール姿勢でもあります。
プロットは、これらの遷移する姿勢を示しており、それらは [x, y, Θ] のベクトルです。x と y は、車両の位置をメートルなどのワールド単位で指定します。Θ は車両の向きの角度を度単位で指定します。
拡張機能
バージョン履歴
R2018b で導入