自動運転アルゴリズム
知覚アルゴリズムにより、車両は環境内の静的要素と動的要素を理解できるようになります。知覚ソフトウェアにより、車両はオンボード センサーのデータを活用して他の車両の位置と向きを推定できるようになります。知覚ソフトウェアは、SLAM (自己位置推定と環境地図作成の同時実行) アルゴリズムを使用して、段階的な地図の作成と車両の位置推定を同時に行います。Automated Driving Toolbox™ は、以下の用途に関連する知覚ソフトウェア機能を提供します。
検出と追跡 — オブジェクトと車線の検出、カメラ センサーの構成、センサー フュージョンと追跡。
位置推定と地図作成 — SLAM アルゴリズムを使用したマップ作成、および事前に作成された地図による位置推定。
地理および HD マップ — HERE からの Live Map のインポートと地理マップの可視化。
計画アルゴリズムは、知覚ソフトウェアからの出力を使用して、環境の変化に的確に対応するために車両が取るべき最適なパスとアクションを決定します。制御アルゴリズムは、車両が確実にアクションを実行し、計画ソフトウェアによって計画されたパスを正確にたどるようにします。Automated Driving Toolbox は、計画と車両制御に関連するソフトウェアも提供します。
主要なトピック
- 単眼カメラのキャリブレーション
- Get Started with Lidar Lane Detection Using Deep Learning
- Multiple Object Tracking Tutorial
- レーダーおよびビジョンの合成データを使用したセンサー フュージョン
- Code Generation for Tracking and Sensor Fusion
- Performant and Deployable Monocular Visual SLAM
- Performant Monocular Visual-Inertial SLAM
- 横方向制御のチュートリアル
- Code Generation for Path Planning and Vehicle Control
カテゴリ
- 検出と追跡
カメラ センサーの構成、オブジェクトと車線の検出、追跡とセンサー フュージョン
- 位置推定と地図作成
ビジョンおよび LiDAR データを使用した自己位置推定と環境地図作成の同時実行、地図の作成、オドメトリ
- 計画と制御
ビークル コストマップ、最適な RRT* パス プランニング、横方向コントローラーと縦方向コントローラー
- 地理および HD マップ
HERE HD Live Map データのインポート、ストリーミング地理マップ データの表示、座標変換
注目の例

Create 360° Bird's-Eye-View Image Around a Vehicle
Create a 360° bird's-eye-view image around a vehicle for use in a surround view monitoring system. It then shows how to generate code for the same bird's-eye-view image creation algorithm and verify the results.
Lane Detection in Lidar Data Using Deep Learning
Detect lanes in lidar point clouds using LLDN-GFC deep learning network.

深層学習車両検出器の学習
深層学習を使用して視覚ベースの車両検出器に学習させる
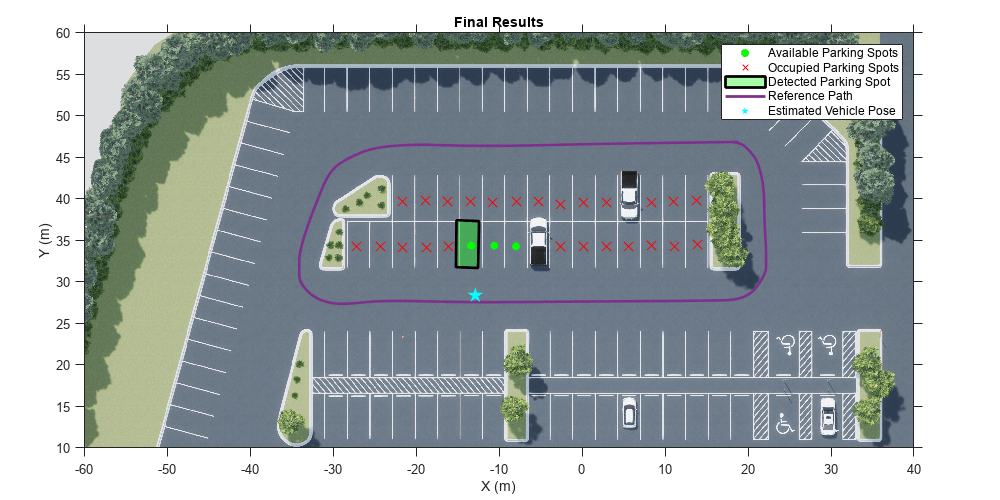
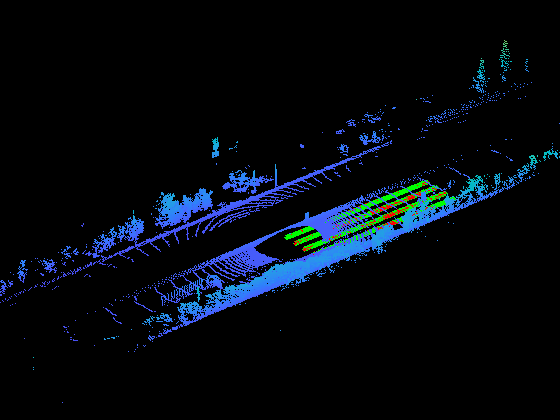
Perception Based Live Parking Spot Detection Using Unreal Engine Simulation
Develop a live parking spot detection system using deep learning and SLAM.

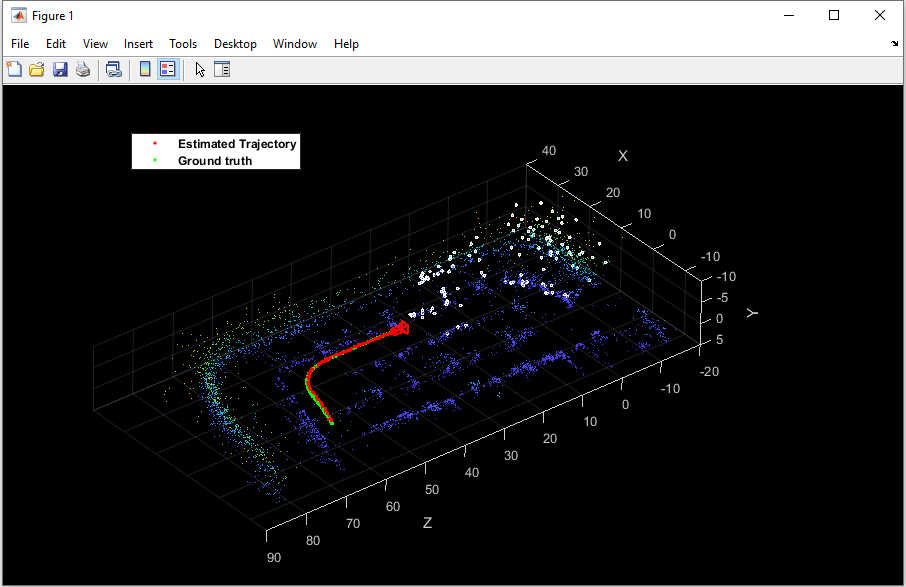
Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data from the Unreal Engine® simulation environment.

Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment
Develop a simultaneous localization and mapping algorithm using synthetic lidar sensor data recorded from the Unreal Engine simulation environment.

Extended Object Tracking of Highway Vehicles with Radar and Camera
Track objects whose dimensions span multiple sensor resolution cells.

Track-to-Track Fusion for Automotive Safety Applications
Fuse tracks from two vehicles to provide a more comprehensive estimate of the environment than seen by each vehicle.

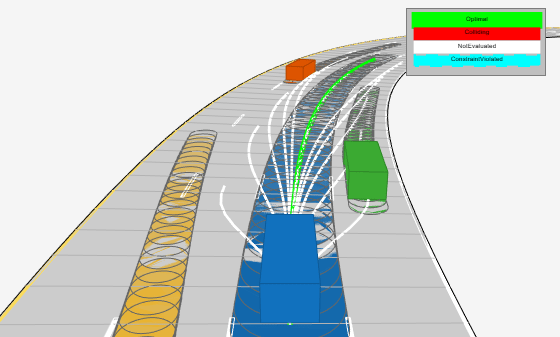
Highway Lane Change Planner and Controller
Design and test the planner and controller components of a lane change maneuver system designed for highway driving.
Highway Trajectory Planning Using Frenet Reference Path
Plan a local trajectory in a highway driving scenario by using a reference path in Frenet coordinates and a dynamic list of obstacles.

Lidar Localization with Unreal Engine Simulation
Develop and evaluate a lidar localization algorithm using synthetic lidar data from the Unreal Engine simulation environment.
Visual Localization in a Parking Lot
Develop a visual localization system using synthetic image data from a parking lot scene in Unreal Engine environment.

Build Occupancy Map from 3-D Lidar Data Using SLAM
Build a 2-D Occupancy map from 3-D Lidar data using a simultaneous localization and mapping (SLAM) algorithm.

単眼カメラとセマンティック セグメンテーションを使用した占有グリッドの作成
セマンティック セグメンテーションと深層学習を使用して自由空間を推定し、占有グリッドを作成する
Object Tracking and Motion Planning Using Frenet Reference Path
Dynamically replan the motion of an autonomous vehicle based on the estimate of the surrounding environment. You use a Frenet reference path and a joint probabilistic data association (JPDA) tracker to estimate and predict the motion of other vehicles on the highway. Compared to the Highway Trajectory Planning Using Frenet Reference Path (Navigation Toolbox) example, you use these estimated trajectories from the multi-object tracker in this example instead of ground truth for motion planning.

Truck Platooning Using Vehicle-to-Vehicle Communication
Simulate truck platooning application using V2V communication in Unreal Engine simulation environment.

Truck Platooning with RoadRunner Scenario
Simulate truck platooning application, designed in Simulink®, with RoadRunner Scenario.