Highway Lane Change Planner and Controller
This example shows how to simulate an automated lane change maneuver system for highway driving scenario.
Introduction
An automated lane change maneuver (LCM) system enables the ego vehicle to automatically move from one lane to another lane. The LCM system models the longitudinal and lateral control dynamics for automated lane change. An LCM system senses the environment for most important objects (MIOs) using on-board sensors, identifies an optimal trajectory that avoids these objects, and steers the ego vehicle along this trajectory.
This example shows how to design and test the planner and controller components of an LCM system. In this example, the lane change planner uses ground truth information from the scenario to detect MIOs. It then generates a feasible trajectory to negotiate a lane change that is executed by the lane change controller. In this example, you:
Explore the test bench model — The model contains planning, controls, vehicle dynamics, scenario, and metrics to assess functionality.
Model the lane change planner — The reference model finds the MIO, samples terminal states of the ego vehicle, and generates an optimal trajectory.
Model the lane change controller — This model generates control commands for the ego vehicle based on the generated trajectory.
Simulate and visualize system behavior — The test bench model is configured to test the integration of planning and controls to perform lane change maneuvers on a curved road with multiple vehicles.
Explore other scenarios — These scenarios test the system under additional conditions.
You can apply the modeling patterns used in this example to test your own planner and controller components of an LCM system.
Explore Test Bench Model
In this example, you use a simulation test bench model to explore the behavior of the planner and controller components for a lane change maneuver system.
To explore the test bench model, load the highway lane change planner and controller project.
openProject("HLCPlannerAndController");
Open the simulation test bench model.
open_system('HLCPlannerAndControllerTestBench');
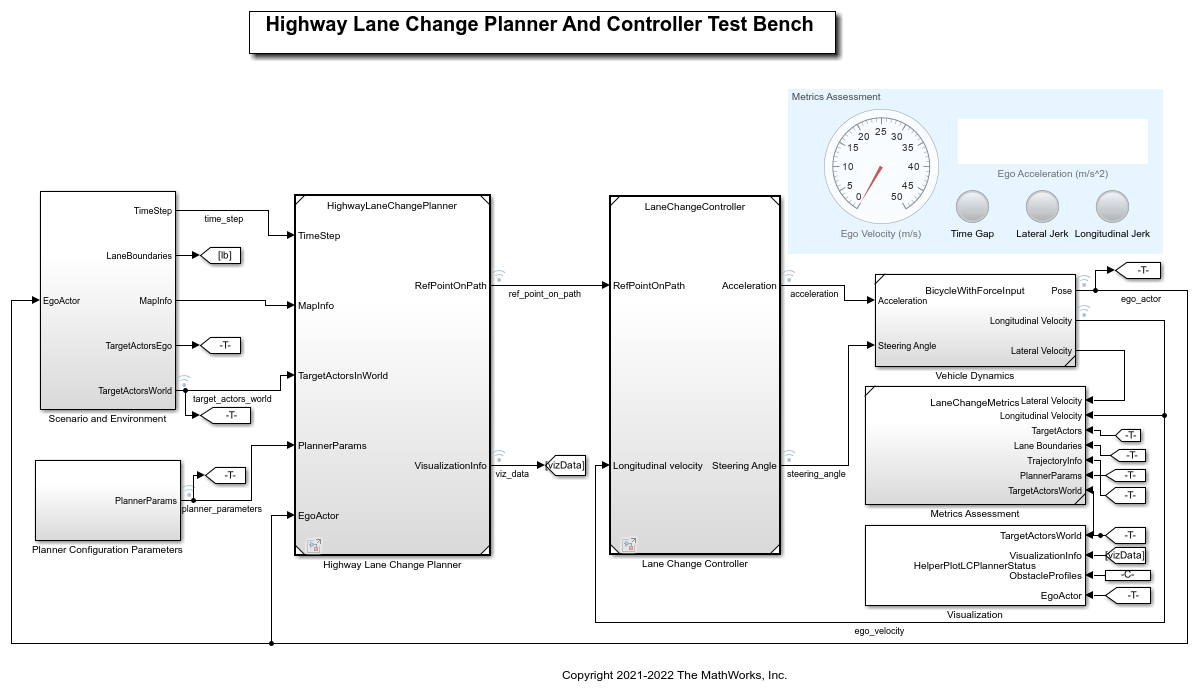
Opening this model runs the helperSLHLCPlannerAndControllerSetup script that initializes the road scenario using the drivingScenario object in the base workspace. It also configures the planner configuration parameters, controller design parameters, vehicle model parameters, and the Simulink® bus signals required for defining the inputs and outputs for the HLCPlannerAndControllerTestBench model.
The test bench model contains the following subsystems.
Scenario and Environment — Subsystem that specifies the scene, vehicles, and map data used for simulation.
Planner Configuration Parameters — Subsystem that specifies the configuration parameters required for the planner algorithm.
Highway Lane Change Planner — Subsystem that implements the lane change planner algorithm for highway.
Lane Change Controller — Subsystem that specifies the path following controller that generates control commands to steer the ego vehicle along the generated trajectory.
Vehicle Dynamics — Subsystem that specifies the dynamic model for the ego vehicle.
Metrics Assessment — Subsystem that specifies metrics to assess system level behavior.
The Vehicle Dynamics subsystem models the ego vehicle using a Bicycle Model and updates its state using commands received from the Lane Change Controller. For more details on Vehicle Dynamics subsystem, see Highway Lane Following example.
The Scenario and Environment subsystem uses the Scenario Reader block to provide road network and vehicle ground truth positions. This block also outputs map data required for the highway lane change planner algorithm. Open the Scenario and Environment subsystem.
open_system('HLCPlannerAndControllerTestBench/Scenario and Environment')
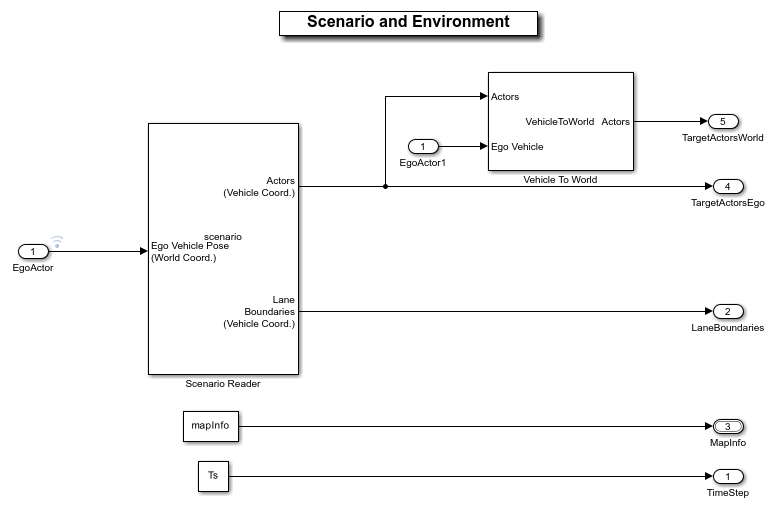
The Scenario Reader block is configured to read the drivingScenario object from the base workspace. It uses this object to read the actor data. It takes in ego vehicle information to perform a closed-loop simulation. This block outputs ground truth information of the lanes and actors in ego vehicle coordinates. The Vehicle To World block is used to convert target vehicle positions from the vehicle coordinates to world coordinates. This subsystem reads map data from the base workspace and outputs information about the lanes and reference path.
The Planner Configuration Parameters subsystem reads base workspace variables using constant blocks and constructs a bus structure using the Bus Creator block. The bus created by this subsystem is used by the lane change planner.
The Highway Lane Change Planner reference model uses ground truth actor positions in world coordinates, map data, and planner configuration parameters to perform trajectory planning for the automated lane change maneuver.
Model Highway Lane Change Planner
The Highway Lane Change Planner reference model implements the main algorithm for the highway lane change system. The model finds the MIOs surrounding the ego vehicle using the Fernet coordinate system. Subsequently, the model samples terminal states for different behaviors, predicts the motion of target actors, and generates multiple trajectories. Finally, the model evaluates the costs of generated trajectories and checks for the possibility of collision and kinematic feasibility to estimate the optimal trajectory. Open the Highway Lane Change Planner reference model.
open_system('HighwayLaneChangePlanner')
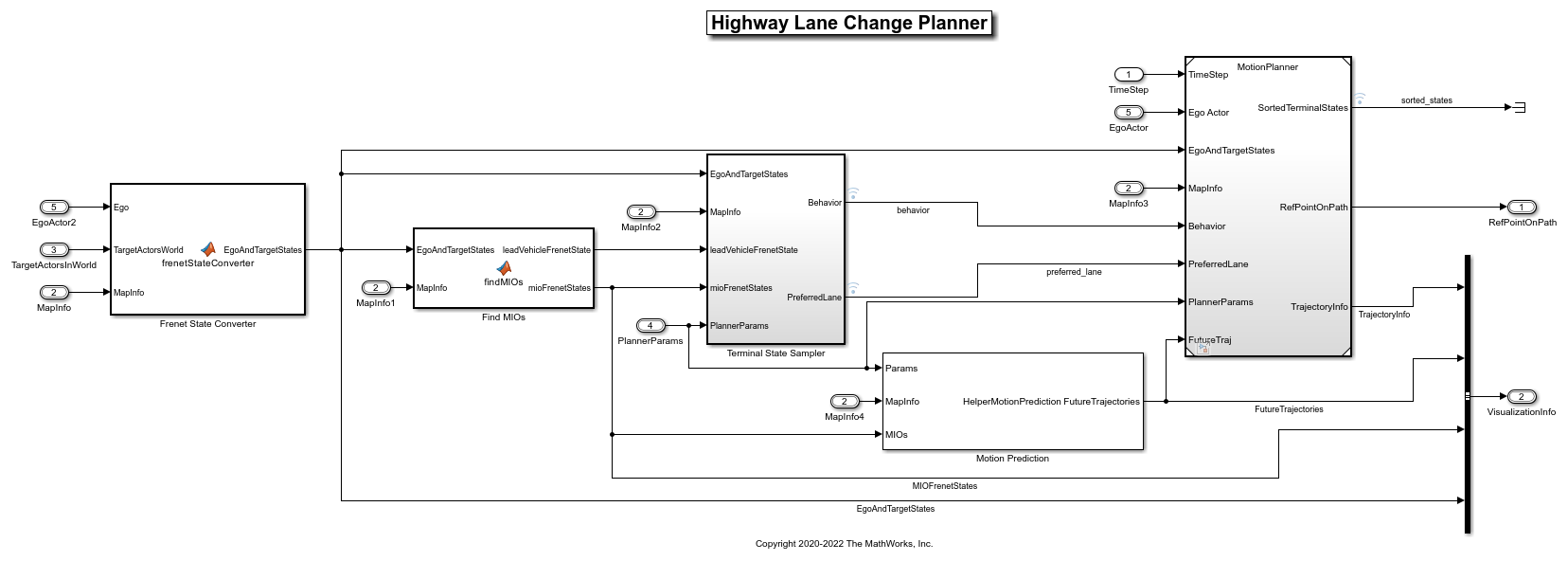
The Highway Lane Change Planner model contains the following blocks:
The Frenet State Converter block converts the pose of the ego vehicle and other vehicles in the scenario into the Frenet coordinate system from world coordinates.
The Find MIOs block identifies the MIOs surrounding the ego vehicle.
The Terminal State Sampler block samples terminal states for cruise control, lead car following, and lane change behaviors. The Motion Prediction module predicts the motion of MIOs.
The Motion Planner reference model generates an optimal trajectory from the sampled trajectories. This model checks the sampled trajectories for cost, feasibility, and the possibility of collision to identify the optimal trajectory. This block also computes the appropriate point on the trajectory for the ego vehicle to follow. For more information on the Highway Lane Change Planner, see Generate Code for Highway Lane Change Planner.
Model Lane Change Controller
The Lane Change Controller reference model simulates a path following control mechanism that keeps the ego vehicle traveling along the generated trajectory while tracking a set velocity. To do so, the controller adjusts both the longitudinal acceleration and front steering angle of the ego vehicle. The controller computes optimal control actions while satisfying velocity, acceleration, and steering angle constraints using adaptive model predictive control (MPC). Open the Lane Change Controller reference model.
open_system('LaneChangeController')
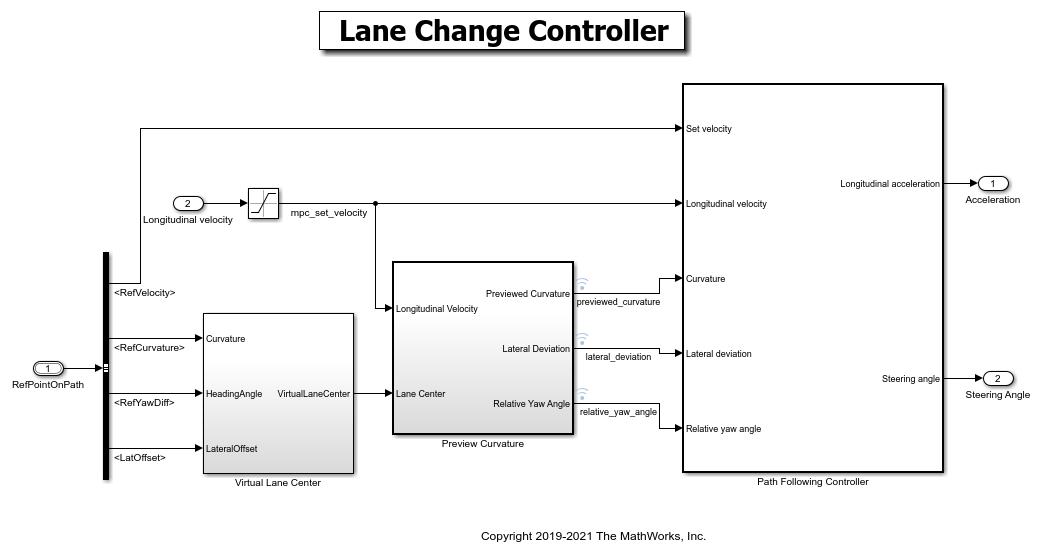
The Virtual Lane Center subsystem creates a virtual lane from the path point. The virtual lane matches the format required by the Path Following Controller block.
The Preview Curvature subsystem converts trajectory to curvature input required by Path Following Controller block.
The Path Following Controller block uses the Path Following Control System (Model Predictive Control Toolbox) block from the Model Predictive Control Toolbox™.
The Path Following Controller block keeps the vehicle traveling within a marked lane of a highway while maintaining a user-set velocity. This controller includes combined longitudinal and lateral control of the ego vehicle:
Longitudinal control maintains a user-set velocity of the ego vehicle.
Lateral control keeps the ego vehicle traveling along the center line of its lane by adjusting the steering of the ego vehicle.
Explore Metrics Assessment
The Metrics Assessment subsystem assesses system level behavior of the LCM system using the metrics mentioned below. Open the Metrics Assessment subsystem.
open_system('HLCPlannerAndControllerTestBench/Metrics Assessment')
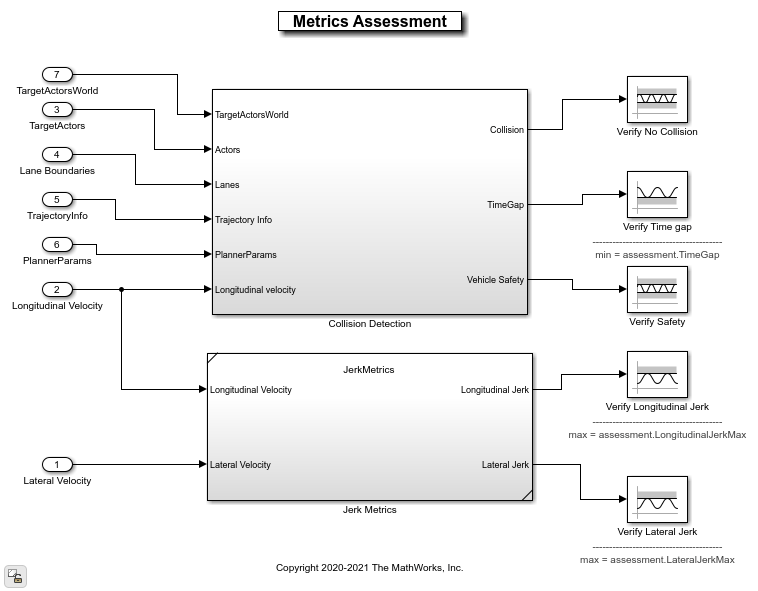
The DetectCollision block detects the collision of the ego vehicle with other vehicles and halts the simulation if a collision is detected.
The DetectLeadVehicle block computes the headway between the ego and lead vehicles, which is used for computing the TimeGap value.
The TimeGap value is calculated using the distance to the lead vehicle (headway) and the longitudinal velocity of the ego vehicle, and it is evaluated against prescribed limits.
The LongitudinalJerk value is calculated using the longitudinal velocity and evaluated against prescribed limits.
The LateralJerk value is calculated using the lateral velocity evaluated against prescribed limits.
Simulate and Visualize System Behavior
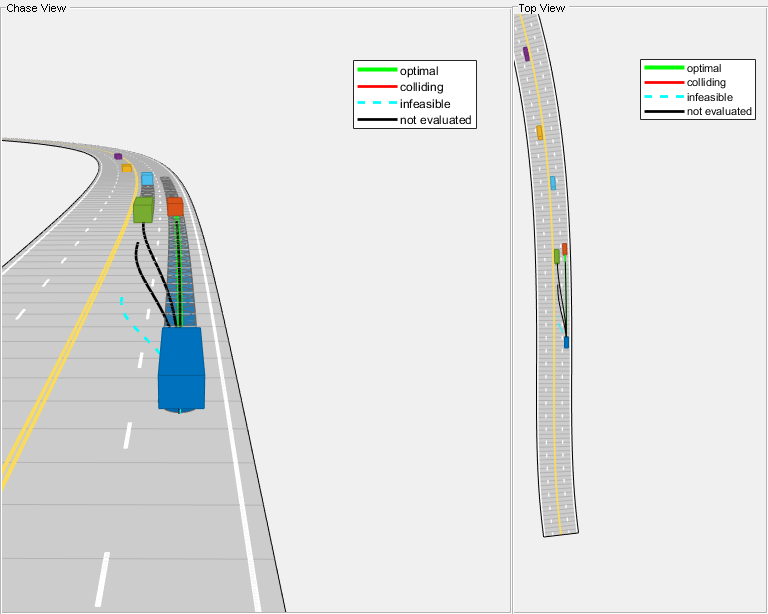
Set up and run the HLCPlannerAndControllerTestBench simulation model to visualize the behavior of the system during a lane change. The Visualization block in the model creates a MATLAB figure that shows the chase view and top view of the scenario and plots the ego vehicle, sampled trajectories, capsule list, and other vehicles in the scenario. Configure the HLCPlannerAndControllerTestBench model to use the scenario_LC_15_StopnGo_Curved scenario.
helperSLHLCPlannerAndControllerSetup('scenarioFcnName','scenario_LC_15_StopnGo_Curved')
Simulate the model for 5 seconds. The highway lane change planner reference model generates a trajectory to navigate the vehicle in the scenario. To reduce command-window output, first turn off the MPC update messages.
mpcverbosity('off'); sim('HLCPlannerAndControllerTestBench','StopTime','5');
Close the figure.
hLCPlot = findobj( 'Type', 'Figure', 'Name', 'Lane Change Status Plot'); if ~isempty(hLCPlot) close(hLCPlot); end
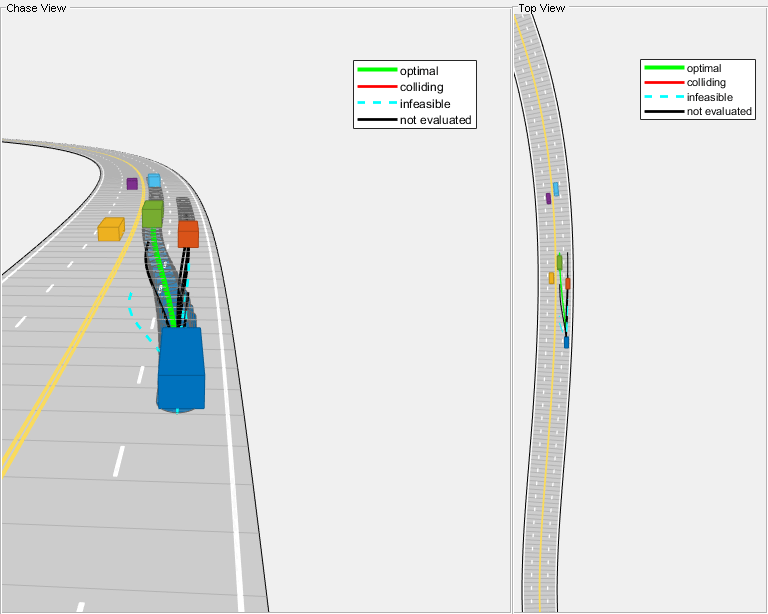
Run the simulation for 8 seconds. The highway lane change planner reference model generates a trajectory to navigate around a slower lead vehicle.
sim('HLCPlannerAndControllerTestBench','StopTime','8');
Close the figure.
hLCPlot = findobj( 'Type', 'Figure', 'Name', 'Lane Change Status Plot'); if ~isempty(hLCPlot) close(hLCPlot); end
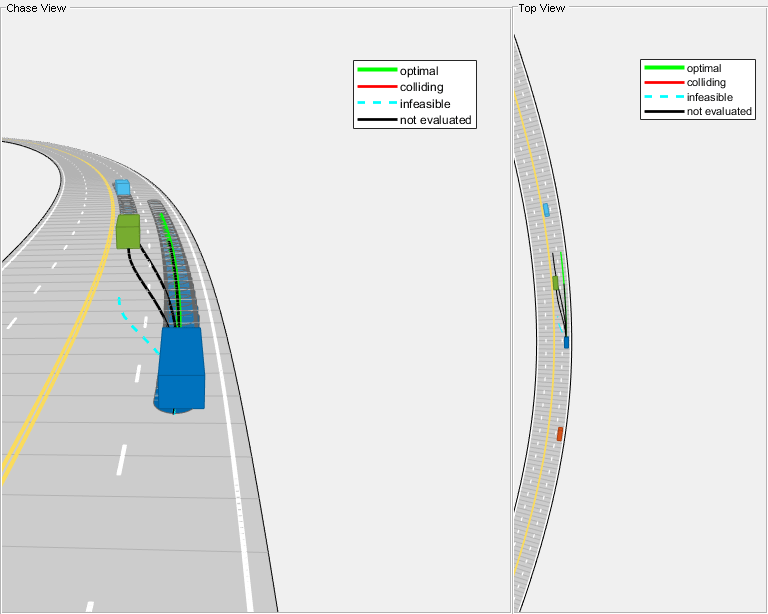
Run the simulation for 18 seconds. The highway lane change planner reference model generates a trajectory to navigate the vehicle to the left lane and then to the right lane to avoid collision with the slow moving lead vehicle. Observe that the ego vehicle performs a lane change twice to avoid collision while maintaining a set velocity.
simout = sim('HLCPlannerAndControllerTestBench','StopTime','18');
Close the figure.
hLCPlot = findobj( 'Type', 'Figure', 'Name', 'Lane Change Status Plot'); if ~isempty(hLCPlot) close(hLCPlot); end
During the simulation, the model logs signals to base workspace as logsout. You can analyze the simulation results and debug any failures in the system behavior using the HelperAnalyzeLCPlannerSimulationResults object. The visualizeSimulationData function of the object creates a MATLAB figure and plots chase view of the scenario.For more details on this figure, see the Generate Code for Highway Lane Change Planner example. Run the function and explore the plot.
visualizatonObj = HelperAnalyzeLCPlannerSimulationResults(simout.logsout); visualizatonObj.visualizeSimulationData

Explore Other Scenarios
In the previous section, you explored the system behavior for the scenario_LC_15_StopnGo_Curved scenario. Below is a list of scenarios that are compatible with the HLCPlannerAndControllerTestBench model.
scenario_LC_01_SlowMoving
scenario_LC_02_SlowMovingWithPassingCar
scenario_LC_03_DisabledCar
scenario_LC_04_CutInWithBrake
scenario_LC_05_SingleLaneChange
scenario_LC_06_DoubleLaneChange
scenario_LC_07_RightLaneChange
scenario_LC_08_SlowmovingCar_Curved
scenario_LC_09_CutInWithBrake_Curved
scenario_LC_10_SingleLaneChange_Curved
scenario_LC_11_MergingCar_HighwayEntry
scenario_LC_12_CutInCar_HighwayEntry
scenario_LC_13_DisabledCar_Ushape
scenario_LC_14_DoubleLaneChange_Ushape
scenario_LC_15_StopnGo_Curved [Default]
These scenarios are created using the Driving Scenario Designer and are exported to a scenario file. Examine the comments in each file for more details on the road and vehicles in each scenario. You can configure the HLCPlannerAndControllerTestBench and workspace to simulate these scenarios using the helperSLHLCPlannerAndControllerSetup function. For example, you can configure the simulation for a curved road scenario.
helperSLHLCPlannerAndControllerSetup('scenarioFcnName','scenario_LC_10_SingleLaneChange_Curved');
Conclusion
This example shows how to simulate a highway lane change maneuver using ground truth vehicle positions.
Enable the MPC update messages again.
mpcverbosity('on');