vehicleDimensions
車両の寸法の保存
説明
vehicleDimensions オブジェクトは車両の寸法を保存します。次の図は、vehicleDimensions に含まれる寸法を示しています。
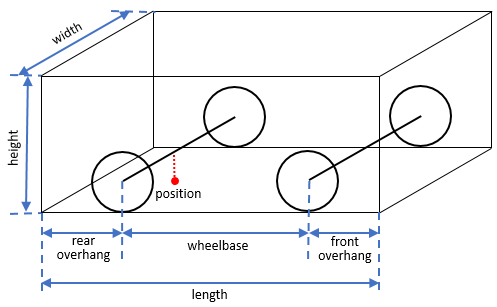
多くの場合、車両の位置は図の赤い点で示されるように、後車軸の中心にある地面上の単一点で表されます。この位置は、車両の自然な回転の中心軸に対応します。
次の表は、代表的な車両のタイプと対応する寸法を示しています。
| 車両の分類 | 長さ | 幅 | 高さ | ホイールベース | フロント オーバーハング | リア オーバーハング |
|---|---|---|---|---|---|---|
| 自動車 (セダン) | 4.7 m | 1.8 m | 1.4 m | 2.8 m | 0.9 m | 1.0 m |
| オートバイ | 2.2 m | 0.6 m | 1.5 m | 1.51 m | 0.37 m | 0.32 m |
作成
構文
説明
vdims = vehicleDimensions は、既定の長さ 4.7 m、幅 1.8 m、および高さ 1.4 m の vehicleDimensions オブジェクトを作成します。
vdims = vehicleDimensions(___, は、1 つ以上の名前と値のペアの引数を使用して Name,Value)Wheelbase、FrontOverhang、RearOverhang、および WorldUnits の各プロパティを設定します。Name はプロパティ名で、Value は対応する値です。Name は一重引用符 (' ') で囲む必要があります。複数の名前と値のペアの引数を、任意の順序で Name1,Value1,...,NameN,ValueN のように指定できます。
プロパティ
例
ヒント
車両の
Lengthは、Wheelbase、FrontOverhang、RearOverhangの和です。FrontOverhangを変更すると、Lengthを一定に保つためにWheelbaseの値が自動的に調整されます。結果としてホイールベースが負になる変更はすべてエラーになります。車両の寸法を使用して、車両周囲のプランニング サーチ スペースを表す
vehicleCostmapを定義できます。pathPlannerRRTなどのパス プランニング アルゴリズムでは車両の寸法を使用して、車両が追従するパスを求めます。
拡張機能
バージョン履歴
R2018a で導入