このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
データ処理と可視化
座標変換系の変換、軌跡の生成、点群の可視化、および変換
異なる座標系間での変換、ウェイポイントからの軌跡の生成、または点群や UAV の姿勢などのデータの可視化を行うユーティリティ関数として、データ処理関数および可視化関数を使用します。
関数
ブロック
| Coordinate Transformation Conversion | 指定した座標変換表現への変換 |
トピック
- Depth and Semantic Segmentation Visualization Using Unreal Engine Simulation
This example shows how to visualize depth and semantic segmentation data captured from a camera sensor in a simulation environment.
- Map and Classify Urban Environment Using UAV Camera and Deep Learning
Use a UAV with a camera to survey and develop an orthomosaic of an urban environment.
注目の例
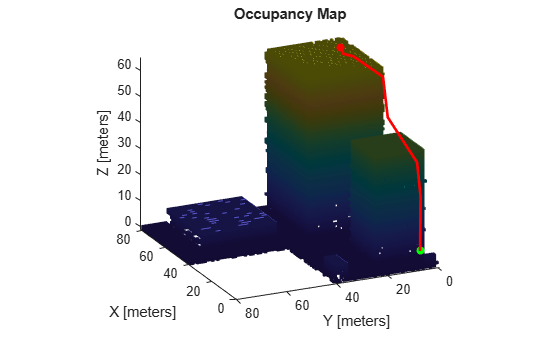
Map Environment for Motion Planning Using UAV Lidar
Use a UAV with lidar sensor to create a 3D occupancy map for motion planning.

Stereo Visual SLAM for UAV Navigation in 3D Simulation
Generate a map for a city block scene in an Unreal Engine environment using stereo visual simultaneous localization and mapping.