PointCloud2
(削除予定) 点群メッセージへのアクセス
PointCloud2 オブジェクトは将来のリリースで削除されます。関数 rosmessage を使用して ROS メッセージを作成する場合は、名前と値の引数 Dataformat を "struct" として指定して、メッセージ構造体形式を使用します。関数 rosReadXYZ、rosWriteXYZ、rosReadRGB、および rosWriteRGB を使用して、点群メッセージを操作できます。詳細については、ROS メッセージ構造体の関数を参照してください。
説明
作成
説明
ptcloud = rosmessage('sensor_msgs/PointCloud2') は、空の PointCloud2 オブジェクトを作成します。点群データを指定するには、ptcloud.Data プロパティを使用します。rossubscriber を使用して、ROS ネットワークから点群データのメッセージを取得することもできます。
プロパティ
オブジェクト関数
readAllFieldNames | (To be removed) Get all available field names from ROS point cloud |
readField | (削除予定) フィールド名に基づいた点群データの読み取り |
readRGB | (削除予定) 点群データからの RGB 値の抽出 |
readXYZ | (削除予定) 点群データからの XYZ 座標の抽出 |
scatter3 | 散布図での点群の表示 |
showdetails | (削除予定) すべての ROS メッセージの内容の表示 |
例
点群メッセージ内のデータにアクセスして可視化します。
サンプルの ROS メッセージを作成して点群イメージを検査します。ptcloud はサンプルの ROS PointCloud2 メッセージ オブジェクトです。
exampleHelperROSLoadMessages ptcloud
ptcloud =
ROS PointCloud2 message with properties:
PreserveStructureOnRead: 0
MessageType: 'sensor_msgs/PointCloud2'
Header: [1×1 Header]
Fields: [4×1 PointField]
Height: 480
Width: 640
IsBigendian: 0
PointStep: 32
RowStep: 20480
Data: [9830400×1 uint8]
IsDense: 0
Use showdetails to show the contents of the message
readXYZ および readRGB を使用して、点群から RGB 情報と xyz 座標を取得します。
xyz = readXYZ(ptcloud); rgb = readRGB(ptcloud);
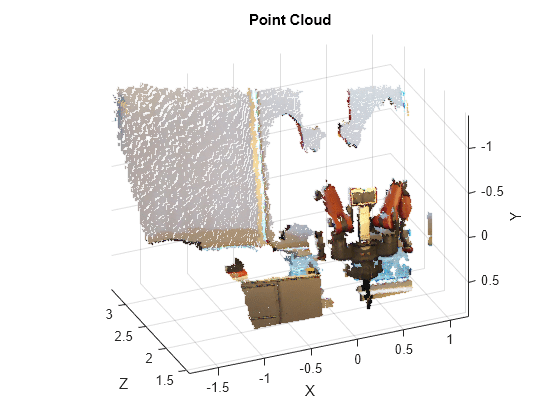
scatter3 を使用して、Figure 内に点群を表示します。
scatter3(ptcloud)
ROS Toolbox の点群メッセージを、Computer Vision Toolbox™ の pointCloud オブジェクトに変換します。
サンプル メッセージを読み込みます。
exampleHelperROSLoadMessages
ptcloud メッセージを pointCloud オブジェクトに変換します。
pcobj = pointCloud(readXYZ(ptcloud),'Color',uint8(255*readRGB(ptcloud)))pcobj =
pointCloud with properties:
Location: [307200×3 single]
Count: 307200
XLimits: [-1.8147 1.1945]
YLimits: [-1.3714 0.8812]
ZLimits: [1.4190 3.3410]
Color: [307200×3 uint8]
Normal: []
Intensity: []