scatter3
散布図での点群の表示
説明
scatter3( は、入力 pcloud)pcloud 点群を現在の axes ハンドルの 3 次元散布図としてプロットします。データが各点につき RGB 情報を含む場合、散布図は適宜色付けされます。
scatter3( は、1 つ以上の pcloud,Name,Value)Name,Value 引数のペアによって指定された追加オプションを提供します。Name は一重引用符 (('')) で囲まなければなりません。名前と値のペアの引数を複数、任意の順序で、Name1,Value1,...,NameN,ValueN のように指定できます。
h = scatter3(___)h を使用します。
ROS 点群メッセージをプロットする場合、MATLAB® は軸の向きに対する ROS の標準の規則に従います。この規則は、正の x は前方向、正の y は左方向、正の z は上方向を示しています。カメラを使用する場合、2 番目の座標系は軸の向きを変更する "_optical" 接尾辞を付けて定義されます。この場合、正の z は前方向、正の x は右方向、正の y は下方向になります。MATLAB は "_optical" 接尾辞を探し、散布図の軸の向きを適宜調整します。詳細については、ROS Wiki の Axis Orientation を参照してください。
例
ROS ネットワークに接続します。点群メッセージのトピックをサブスクライブします。
rosinit('192.168.17.129')Initializing global node /matlab_global_node_65972 with NodeURI http://192.168.17.1:51971/
sub = rossubscriber('/camera/depth/points');
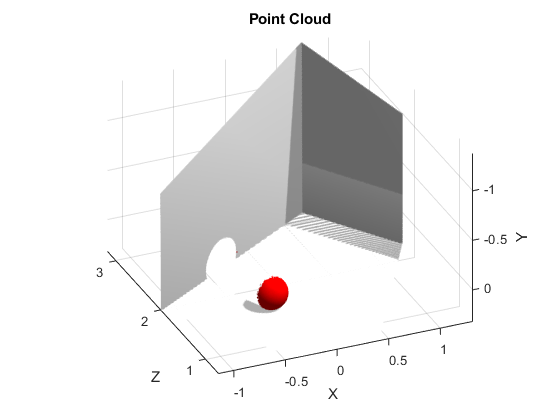
pause(1)最新の点群メッセージを取得します。点群をプロットします。
pcloud = sub.LatestMessage; scatter3(pcloud)
すべての点を黒い点としてプロットします。
scatter3(sub.LatestMessage,'MarkerEdgeColor',[0 0 0]);
入力引数
名前と値の引数
オプションの引数のペアを Name1=Value1,...,NameN=ValueN として指定します。ここで、Name は引数名で、Value は対応する値です。名前と値の引数は他の引数の後に指定しなければなりませんが、ペアの順序は重要ではありません。
R2021a より前では、コンマを使用して名前と値をそれぞれ区切り、Name を引用符で囲みます。
例: 'MarkerEdgeColor',[1 0 0]
あるいは、名前を使用して一部の一般的な色を指定できます。次の表に、名前の付いた色オプション、等価の RGB 3 成分、および 16 進数カラー コードを示します。
| 色名 | 省略名 | RGB 3 成分 | 16 進数カラー コード | 外観 |
|---|---|---|---|---|
"red" | "r" | [1 0 0] | "#FF0000" |
|
"green" | "g" | [0 1 0] | "#00FF00" |
|
"blue" | "b" | [0 0 1] | "#0000FF" |
|
"cyan" | "c" | [0 1 1] | "#00FFFF" |
|
"magenta" | "m" | [1 0 1] | "#FF00FF" |
|
"yellow" | "y" | [1 1 0] | "#FFFF00" |
|
"black" | "k" | [0 0 0] | "#000000" |
|
"white" | "w" | [1 1 1] | "#FFFFFF" |
|
"none" | 該当なし | 該当なし | 該当なし | 色なし |








次の表に、プロット用のライト テーマとダーク テーマの既定のカラー パレットを示します。
| パレット | パレットの色 |
|---|---|
R2025a より前: ほとんどのプロットでは、既定でこれらの色が使用されます。 |
|
|
|


orderedcolors 関数と rgb2hex 関数を使用して、これらのパレットの RGB 3 成分と 16 進数カラー コードを取得できます。たとえば、"gem" パレットの RGB 3 成分を取得し、それを 16 進数カラー コードに変換します。
RGB = orderedcolors("gem");
H = rgb2hex(RGB);R2023b より前: RGB = get(groot,"FactoryAxesColorOrder") を使用して RGB 3 成分を取得します。
R2024a より前: H = compose("#%02X%02X%02X",round(RGB*255)) を使用して 16 進数カラー コードを取得します。
例: [0.5 0.5 0.5]
例: "blue"
例: "#D2F9A7"
座標軸の親。点群の描画に使用する、'Parent' と axes オブジェクトからなるコンマ区切りのペアとして指定します。既定では、点群はアクティブな座標軸にプロットされます。
出力
バージョン履歴
R2019b で導入