setBlockParam
slTuner インターフェイス内の調整ブロックのパラメーター化を設定
構文
説明
setBlockParam( は、st,blk,tunable_mdl)slTuner インターフェイスの指定ブロックのパラメーター化として、調整可能なモデルを割り当てます。
setBlockParam( は、一度に複数のブロックにパラメーター化を割り当てます。st,blk1,tunable_mdl1,...,blkN,tunable_mdlN)
例
scdcascade モデルの slTuner インターフェイスを作成します。
open_system('scdcascade') st = slTuner('scdcascade',{'C1','C2'});
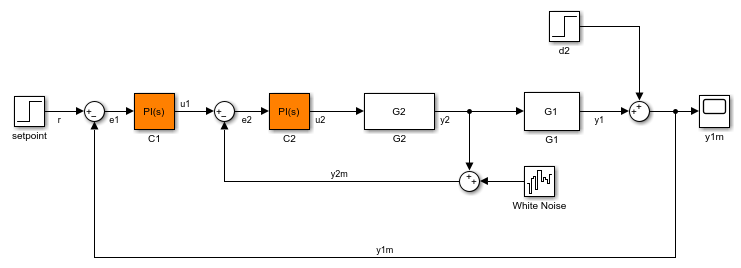
C1 と C2 はどちらも PI コントローラーです。C1 の既定のパラメーター化を調べます。
getBlockParam(st,'C1')
Tunable continuous-time PID controller "C1" with formula:
1
Kp + Ki * ---
s
and tunable parameters Kp, Ki.
Type "pid(ans)" to see the current value.
既定のパラメーター化は、調整可能な PI コントローラー (tunablePID) です。
C1 を比例コントローラーとして再パラメーター化します。比例ゲインを 4.2 に初期化して、パラメーター化をブロックに割り当てます。
G = tunableGain('C1',4.2); setBlockParam(st,'C1',G);
これで、systune などの調整コマンドでは、st の C1 ブロックに対するこの比例コントローラー パラメーター化が使用されるようになります。カスタマイズされたパラメーター化は、Simulink® ブロックの既定のパラメーター化と互換性があります。そのため、writeBlockValue を使用して、調整された値をブロックに書き戻すことができます。
setBlockParam を使用して、モデルを何度も再コンパイルすることなく複数のブロック パラメーター化を一度に設定することもできます。たとえば、C1 と C2 の両方を PID コントローラーとして再パラメーター化します。
C1PID = tunablePID('C1PID','PID'); C2PID = tunablePID('C2PID','PID'); setBlockParam(st,'C1',C1PID,'C2',C2PID);
scdcascade モデルの slTuner インターフェイスを作成します。
open_system('scdcascade') st = slTuner('scdcascade',{'C1','C2'});

C2 のパラメーター化を調整可能なゲインとなるよう変更し、結果を調べます。
G = tunableGain('C2',5); setBlockParam(st,'C2',G); getBlockParam(st,'C2')
Tunable gain "C2" with 1 outputs, 1 inputs, and 1 tunable parameters. Type "ss(ans)" to see the current value.
C2 のパラメーター化を既定の PI コントローラーに戻し、結果を調べます。
setBlockParam(st,'C2'); getBlockParam(st,'C2')
Tunable continuous-time PID controller "C2" with formula:
1
Kp + Ki * ---
s
and tunable parameters Kp, Ki.
Type "pid(ans)" to see the current value.
入力引数
詳細
バージョン履歴
R2011b で導入