gearConditionMetrics
ギア状態監視の標準メトリクス
構文
説明
gearMetrics = gearConditionMetrics(X)X の振動データを使用してギア状態監視メトリクス gearMetrics を返します。gearConditionMetrics では、X の各 cell 要素に時間同期平均化 (TSA) 信号、差分信号、規則的な信号、および残差信号の列がそれぞれの順序で格納されていることを前提としています。信号が同じ順序でない場合は、Name,Value のペアの引数を使用します。
gearMetrics = gearConditionMetrics(T)T からギア状態監視メトリクス gearMetrics を計算します。gearConditionMetrics では、T に TSA 信号、差分信号、規則的な信号、および残差信号の列がそれぞれの順序で格納されていることを前提としています。信号が同じ順序でない場合は、Name,Value のペアの引数を使用します。
gearMetrics = gearConditionMetrics(___,Name,Value)
gearMetrics = gearConditionMetrics(___,'SortBy',sortByValue)sortByValue を使用して信号の履歴の時系列順を指定できます。NA4 については、gearConditionMetrics で現在のインデックスまでの過去のデータ セットを使用してメトリクスが計算されるため、振動データの時系列順に依存します。
[ は、各種信号に割り当てられた table または gearMetrics,info] = gearConditionMetrics(___)fileEnsembleDatastore オブジェクトの変数に関する情報を含む構造体 info も返します。
例
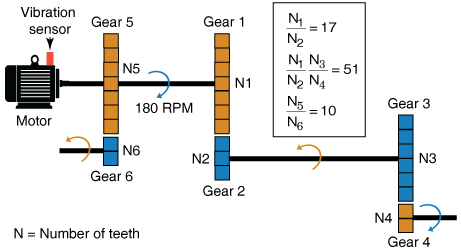
次の図に示すように、振動センサーが取り付けられたモーターで 6 つのギアを駆動するドライブトレインについて考えます。モーター シャフト上のギア 1 は、ギア 2 とギア比 17:1 で噛み合います。最終ギア比、すなわち、ギア 1 と 2 と、ギア 3 と 4 の比は 51:1 です。モーター シャフト上のもう 1 つのギア 5 は、ギア 6 とギア比 10:1 で噛み合います。モーターは 180 RPM で回転し、振動センサーのサンプリング レートは 50 kHz です。
データ セットを作成します。
rpm = 180;
fs = 50e3;
t = (0:1/fs:(1/3)-1/fs)'; % sample times
orderList = [17 51];
f = rpm/60*[1 orderList 10];実際は、加速度計から得られる振動信号などの測定データを使用します。この例では、モーターに取り付けられた振動センサーからのシミュレーション データである TSA 信号 X を生成し、差分信号、規則的な信号、および残差信号を計算します。事前に割り当てた table に信号を格納します。
T = table('Size',[10 4],'VariableTypes',{'cell','cell','cell','cell'},'VariableNames',{'TSA','Diff','Reg','Res'}); for k = 1:10 X = sin(2*pi*f(1)*t) + sin(2*pi*2*f(1)*t) + ... % motor shaft rotation and harmonic 3*sin(2*pi*f(2)*t) + 3*sin(2*pi*2*f(2)*t) + ... % gear mesh vibration and harmonic for gears 1 and 2 4*sin(2*pi*f(3)*t) + 4*sin(2*pi*2*f(3)*t) + ... % gear mesh vibration and harmonic for gears 3 and 4 2*(k/6)*sin(2*pi*10*f(1)*t) + randn(size(t))/5; % gear mesh vibration for gears 5 and 6 and noise res = tsaresidual(X, fs, rpm, orderList); dif = tsadifference(X, fs, rpm, orderList); reg = tsaregular(X, fs, rpm, orderList); T(k,'TSA') = {X}; T(k,'Diff') = {dif}; T(k,'Reg') = {reg}; T(k,'Res') = {res}; end T
T=10×4 table
TSA Diff Reg Res
________________ ________________ ________________ ________________
{16666×1 double} {16666×1 double} {16666×1 double} {16666×1 double}
{16666×1 double} {16666×1 double} {16666×1 double} {16666×1 double}
{16666×1 double} {16666×1 double} {16666×1 double} {16666×1 double}
{16666×1 double} {16666×1 double} {16666×1 double} {16666×1 double}
{16666×1 double} {16666×1 double} {16666×1 double} {16666×1 double}
{16666×1 double} {16666×1 double} {16666×1 double} {16666×1 double}
{16666×1 double} {16666×1 double} {16666×1 double} {16666×1 double}
{16666×1 double} {16666×1 double} {16666×1 double} {16666×1 double}
{16666×1 double} {16666×1 double} {16666×1 double} {16666×1 double}
{16666×1 double} {16666×1 double} {16666×1 double} {16666×1 double}
T は、各要素が cell 配列である 10 行 4 列の table です。
table T のデータ セットを使用してギア状態監視メトリクスを計算します。
[gearMetrics1,info1] = gearConditionMetrics(T,'SignalVariable','TSA','DifferenceVariable','Diff','RegularVariable','Reg','ResidualVariable','Res')
gearMetrics1=10×9 table
RMS Kurtosis CrestFactor FM4 M6A M8A FM0 EnergyRatio NA4
______ ________ ___________ ______ ______ ______ ______ ___________ ______
5.1119 2.074 2.4377 2.4633 9.0009 42.31 1.5499 0.060057 2.4637
5.1272 2.087 2.4819 1.9331 4.9869 15.634 1.5785 0.10044 4.1973
5.1526 2.102 2.4744 1.7084 3.6211 8.8635 1.5881 0.14423 5.5871
5.1877 2.1264 2.5443 1.63 3.1749 6.9296 1.6424 0.18889 6.7318
5.2385 2.1566 2.5985 1.5861 2.9421 6.0165 1.6937 0.23407 7.6258
5.2953 2.1879 2.605 1.5604 2.8046 5.4734 1.7211 0.28052 8.3807
5.365 2.2277 2.6551 1.5423 2.7169 5.1619 1.7761 0.32511 8.8352
5.4425 2.2574 2.6428 1.5356 2.6796 5.016 1.7945 0.37196 9.3879
5.5269 2.2891 2.7112 1.5269 2.6344 4.8502 1.8614 0.41819 9.7477
5.6219 2.3214 2.6979 1.5202 2.6015 4.7342 1.8892 0.46377 10.022
info1 = struct with fields:
SignalVariable: 'TSA'
DifferenceVariable: 'Diff'
RegularVariable: 'Reg'
ResidualVariable: 'Res'
SortBy: [1×0 char]
ギア 5 と 6 の間のギアの噛み合いの故障により、ギア メトリクスが変化していることがわかります。NA4 の値は故障とその伝播に対して非常に敏感であり、さまざまなデータ セットで値が大幅に増加しています。
info1 には、メトリクスの計算に使用された変数に関する情報が格納されています。
あるいは、次の構文を使用してメトリクスを計算することもできます。
[gearMetrics2,info2] = gearConditionMetrics(T,'TSA','Diff','Reg','Res')
gearMetrics2=10×9 table
RMS Kurtosis CrestFactor FM4 M6A M8A FM0 EnergyRatio NA4
______ ________ ___________ ______ ______ ______ ______ ___________ ______
5.1119 2.074 2.4377 2.4633 9.0009 42.31 1.5499 0.060057 2.4637
5.1272 2.087 2.4819 1.9331 4.9869 15.634 1.5785 0.10044 4.1973
5.1526 2.102 2.4744 1.7084 3.6211 8.8635 1.5881 0.14423 5.5871
5.1877 2.1264 2.5443 1.63 3.1749 6.9296 1.6424 0.18889 6.7318
5.2385 2.1566 2.5985 1.5861 2.9421 6.0165 1.6937 0.23407 7.6258
5.2953 2.1879 2.605 1.5604 2.8046 5.4734 1.7211 0.28052 8.3807
5.365 2.2277 2.6551 1.5423 2.7169 5.1619 1.7761 0.32511 8.8352
5.4425 2.2574 2.6428 1.5356 2.6796 5.016 1.7945 0.37196 9.3879
5.5269 2.2891 2.7112 1.5269 2.6344 4.8502 1.8614 0.41819 9.7477
5.6219 2.3214 2.6979 1.5202 2.6015 4.7342 1.8892 0.46377 10.022
info2 = struct with fields:
SignalVariable: 'TSA'
DifferenceVariable: 'Diff'
RegularVariable: 'Reg'
ResidualVariable: 'Res'
SortBy: [1×0 char]
9 つのデータ セットがまとめられた gearData.zip について考えます。TSA 信号、差分信号、規則的な信号、および残差信号についての個別の timetable が各ファイルに格納されています。
圧縮されたファイルを展開し、timetable のデータを読み取り、timetable のデータを使用して fileEnsembleDatastore オブジェクトを作成します。ファイル アンサンブル データストアの作成の詳細については、fileEnsembleDatastoreを参照してください。
unzip gearData.zip; ens = fileEnsembleDatastore(pwd,'.mat'); ens.ReadFcn = @readData; ens.DataVariables = {'TSA','Diff','Reg','Res'}; ens.SelectedVariables = ens.DataVariables;
アンサンブル データストアのデータを使用してギア状態メトリクスを計算します。
[gearMetrics,info] = gearConditionMetrics(ens,'SignalVariable','TSA','DifferenceVariable','Diff','RegularVariable','Reg','ResidualVariable','Res')
gearMetrics=9×9 table
RMS Kurtosis CrestFactor FM4 M6A M8A FM0 EnergyRatio NA4
______ ________ ___________ ______ ______ ______ ______ ___________ ______
5.1119 2.0734 2.3417 2.4977 9.3854 45.859 1.4919 0.060189 2.4981
5.1271 2.086 2.3714 1.9236 4.9222 15.262 1.5155 0.10018 4.1509
5.1526 2.101 2.3938 1.7199 3.6873 9.1708 1.5398 0.14418 5.6187
5.1882 2.1247 2.4128 1.6283 3.1667 6.9051 1.5589 0.18951 6.7806
5.238 2.1572 2.45 1.5816 2.9135 5.8919 1.5994 0.23373 7.5444
5.2947 2.1888 2.4253 1.5571 2.7877 5.4113 1.5956 0.28007 8.3138
5.3657 2.226 2.4526 1.5443 2.7251 5.1856 1.6297 0.32562 8.8783
5.4421 2.2564 2.447 1.5341 2.6718 4.9888 1.6549 0.37177 9.3428
5.5254 2.2867 2.4349 1.5269 2.6354 4.8572 1.6763 0.41747 9.6986
info = struct with fields:
SignalVariable: 'TSA'
DifferenceVariable: 'Diff'
RegularVariable: 'Reg'
ResidualVariable: 'Res'
SortBy: [1×0 char]
出力 table には、各行が 1 つのデータ セットに対応した 9 行のメトリクスが含まれます。
入力引数
名前と値の引数
出力引数
アルゴリズム
平方根平均二乗 (RMS)
TSA 信号の平方根平均二乗 (RMS) は rms コマンドを使用して計算されます。TSA 信号 x の場合、RMS は次のように計算されます。
ここで、N はデータ サンプルの数です。
RMS は、通常はギアボックスの全体的状態の優れたインジケーターですが、歯の初期故障については優れたインジケーターではありません。また、不均衡な回転要素の検出にも有用です。標準的な正規分布の RMS は 1 です。
詳細については、rms を参照してください。
尖度
尖度は分布に外れ値がどの程度発生しやすいかの尺度です。標準正規分布の尖度は 3 です。外れ値がより発生しやすい分布の尖度値は 3 より大きくなり、外れ値が発生しにくい分布の尖度値は 3 より小さくなります。
gearConditionMetrics では、kurtosis コマンドを使用して TSA 信号の尖度値を計算します。シーケンスの尖度は次のように定義されます。
ここで、 は TSA 信号 x の平均です。
詳細については、kurtosis を参照してください。
クレスト ファクター (CF)
Crest Factor は、入力信号 x の RMS の値に対する正のピーク値の比率です。gearConditionMetrics では、peak2rms コマンドを使用して TSA 信号のクレスト ファクターを計算します。
シーケンスのクレスト ファクターは次のように定義されます。
ここで、P(x) は TSA 信号のピーク値です。
クレスト ファクターは、信号の実効値に対するピークの相対的な大きさを示します。振動信号がインパルス特性を示す場合、初期段階のギアの破損の優れたインジケーターになります。
FM4
FM4 インジケーターは、ギアの噛み合いにおける限られた数の歯のみに分離された故障の検出に使用されます。FM4 は、差分信号の正規化された尖度として定義されます[4]。標準正規分布の FM4 は 3 です。
FM4 は次のように計算されます。
ここで、 は差分信号 d の平均です。
M6A
M6A インジケーターは、機械コンポーネントにある表面の破損の検出に使用されます。採用している理論は FM4 メトリクスと同じですが、M6A では分散の 3 乗で正規化された差分信号の 6 次モーメントを使用します。標準正規分布の M6A は 15 です。そのため、M6A は差分信号のピークに対してさらに敏感であると期待されます。gearConditionMetrics では、moment コマンドを使用して M6A を計算します。
M6A は次のように計算されます。
ここで、 は差分信号 d の平均です。
M8A
M8A インジケーターは、M6A の改良版です。M8A は分散の 4 乗で正規化されるため、差分信号のピークに対してさらに敏感であると期待されます。標準正規分布の M8A は 105 です。次のように計算されます。
FM0
FM0 は、ギアの噛み合いパターンにおける大きな異常の検出に役立ちます。これは、TSA 信号の最大ピーク間振幅を噛み合い周波数の振幅およびその高調波と比較することで行われます。gearConditionMetrics では、peak2peak コマンドと fft コマンドの組み合わせを使用して FM0 メトリクスを計算します。
FM0 は次のように計算されます。
ここで、PP(x) は TSA 信号のピーク間の値です。A には、噛み合い周波数での周波数領域の振幅とその高調波が含まれます。これは、規則的な信号のエネルギーを表します。
A は次のように計算されます。
ここで、R(t) は規則的な信号です。
エネルギー比 (ER)
Energy Ratio は、差分信号と規則的な信号の標準偏差の比率として定義されます[1]。ギアの複数の歯が破損している重度の一様な摩耗のインジケーターとして有用です。
Energy Ratio は次のように計算されます。
ここで、d と R は差分信号と規則的な信号をそれぞれ表します。
NA4
NA4 は、FM4 インジケーターの改良版です[3]。NA4 は破損の開始を示し、それが広がり大きくなるにつれて破損に反応し続けます。
NA4 は次のように計算されます。
ここで、残差信号の分散のランニング平均を使用して、現在の時間 k までのすべての振動データ セットについての正規化が行われます。
参照
[1] Keller, Jonathan A., and P. Grabill. "Vibration monitoring of UH-60A main transmission planetary carrier fault." Annual Forum Proceedings-American Helicopter Society. Vol. 59. No. 2. American Helicopter Society, Inc, 2003.
[2] Večeř, P., Marcel Kreidl, and R. Šmíd. "Condition indicators for gearbox condition monitoring systems." Acta Polytechnica pages 35-43, 45.6 (2005).
[3] Zakrajsek, James J., Dennis P. Townsend, and Harry J. Decker. "An analysis of gear fault detection methods as applied to pitting fatigue failure data." Technical Memorandum 105950. No. NASA-E-7470. NASA, 1993.
[4] Zakrajsek, James J. "An investigation of gear mesh failure prediction techniques." MS Thesis-Cleveland State University, 1989.
拡張機能
バージョン履歴
R2019a で導入