tsaregular
時間同期平均化信号の規則的な信号
構文
説明
___ = tsaregular(___, では、1 つ以上の名前と値のペアの引数を使用して追加のパラメーターを指定できます。この構文は、前述の任意の入力引数と出力引数で使用できます。Name,Value)
出力引数のない tsaregular(___) は、TSA の生の信号と規則的な信号の時間領域プロットと周波数領域プロットをプロットします。
例
次の図に示すように、振動センサーが取り付けられたモーターで 6 つのギアを駆動するドライブトレインについて考えます。モーター シャフト上のギア 1 は、ギア 2 とギア比 17:1 で噛み合います。最終ギア比、すなわち、ギア 1 と 2 と、ギア 3 と 4 の比は 51:1 です。モーター シャフト上のもう 1 つのギア 5 は、ギア 6 とギア比 10:1 で噛み合います。モーターは 180 RPM で回転し、振動センサーのサンプリング レートは 50 KHz です。ギア 1 と 2、ギア 3 と 4、およびシャフトの回転の噛み合い成分を含む信号を保持するには、それらのギア比 17 と 51 を orderList で指定します。シャフトの回転に対応する信号成分 (order = 1) は計算に暗黙的に常に含まれます。
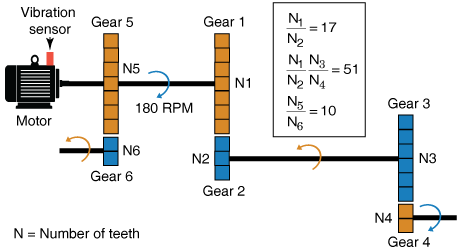
rpm = 180;
fs = 50e3;
t = (0:1/fs:(1/3)-1/fs)'; % sample times
orderList = [17 51];
f = rpm/60*[1 orderList 10];実際は、加速度計から得られる振動信号などの測定データを使用します。この例では、モーターに取り付けられた振動センサーからのシミュレーション データである TSA 信号 X を生成します。
X = sin(2*pi*f(1)*t) + sin(2*pi*2*f(1)*t) + ... % motor shaft rotation and harmonic 3*sin(2*pi*f(2)*t) + 3*sin(2*pi*2*f(2)*t) + ... % gear mesh vibration and harmonic for gears 1 and 2 4*sin(2*pi*f(3)*t) + 4*sin(2*pi*2*f(3)*t) + ... % gear mesh vibration and harmonic for gears 3 and 4 2*sin(2*pi*10*f(1)*t); % gear mesh vibration for gears 5 and 6
サンプル時間、rpm、および保持する噛み合い次数を使用して、TSA 信号の規則的な信号を計算します。
Y = tsaregular(X,t,rpm,orderList);
出力 Y は、ギア 5 と 6 のギア噛み合い信号と高調波を除くすべてを含むベクトルです。
規則的な信号、生の TSA 信号、およびそれらの振幅スペクトルをプロットで可視化します。
tsaregular(X,fs,rpm,orderList)
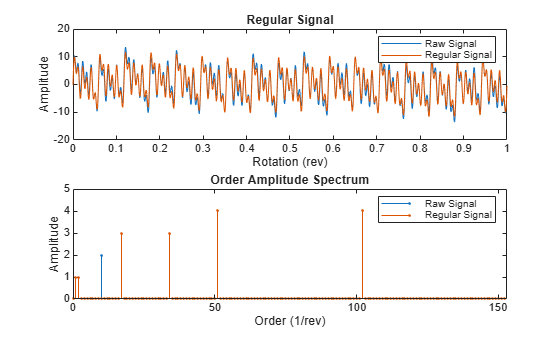
振幅スペクトルのプロットで次の成分を確認します。
次数 17 の保持された成分と次数 34 のその高調波
次数 51 の 2 つ目の保持された成分と次数 102 のその高調波
次数 10 のギア 5 と 6 のフィルター処理された噛み合い成分
次数 1 と 2 の保持されたシャフト成分
スペクトルのプロットの振幅と個々の信号の振幅の一致
この例の sineWavePhaseMod.mat には、位相変調された正弦波のデータが格納されています。XT は正弦波データの timetable、使用された rpm は 60 RPM です。正弦波の周波数は 32 Hz であり、変調されない正弦波を復元するには orderList として 32 を使用します。
データと必要な変数を読み込みます。
load('sineWavePhaseMod.mat','XT','rpm','orders') head(XT,4)
Time Data
______________ _______
0 sec 0
0.00097656 sec 0.2011
0.0019531 sec 0.39399
0.0029297 sec 0.57078
XT の時間値は厳密に増加する等間隔の有限値であることに注意してください。
規則的な信号とその振幅スペクトルを計算します。次数の単位が Hz であるため、'Domain' の値を 'frequency' に設定します。
[Y,S] = tsaregular(XT,rpm,orders,'Domain','frequency')
Y=1024×1 timetable
Time Data
______________ __________
0 sec -2.552e-15
0.00097656 sec 0.14928
0.0019531 sec 0.29283
0.0029297 sec 0.42512
0.0039062 sec 0.54108
0.0048828 sec 0.63624
0.0058594 sec 0.70695
0.0068359 sec 0.75049
0.0078125 sec 0.7652
0.0087891 sec 0.75049
0.0097656 sec 0.70695
0.010742 sec 0.63624
0.011719 sec 0.54108
0.012695 sec 0.42512
0.013672 sec 0.29283
0.014648 sec 0.14928
⋮
S = 1024×1 complex
0.0000 + 0.0000i
0.0000 - 0.0000i
0.0000 + 0.0000i
0.0000 + 0.0000i
-0.0000 - 0.0000i
-0.0000 - 0.0000i
-0.0000 - 0.0000i
-0.0000 + 0.0000i
0.0000 + 0.0000i
-0.0000 - 0.0000i
-0.0000 + 0.0000i
0.0000 + 0.0000i
-0.0000 - 0.0000i
0.0000 - 0.0000i
-0.0000 - 0.0000i
⋮
出力 Y は規則的な信号 (つまり変調されない正弦波) を含む timetable、S は規則的な信号 Y の振幅スペクトルを含むベクトルです。
この例の sineWaveAmpMod.mat には、振幅変調された正弦波のデータが格納されています。X はシャフト回転数 60 RPM で得られた振幅変調後の正弦波のデータを含むベクトルです。変調されない正弦波の周波数は 32 Hz、振幅は 1.0 単位です。
データを読み込み、振幅変調後の TSA 信号 X の規則的な信号をプロットします。変調されない信号を保持するには、orderList で周波数 32 Hz を指定します。'Domain' の値を 'frequency' に設定します。
load('sineWaveAmpMod.mat','X','t','rpm','orderList') tsaregular(X,t,rpm,orderList,'Domain','frequency');
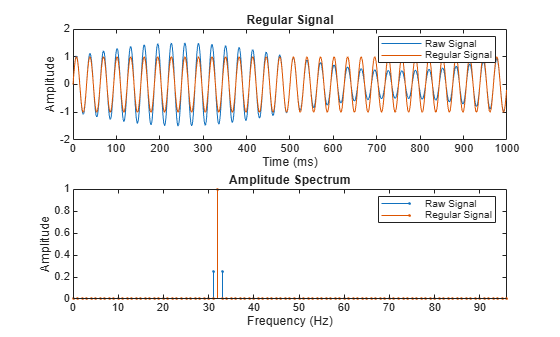
プロットで規則的な信号と生の信号の波形と振幅スペクトルをそれぞれ確認します。規則的な信号に振幅 1.0 単位、周波数 32 Hz の変調されない正弦波が含まれていることがわかります。
入力引数
名前と値の引数
出力引数
アルゴリズム
規則的な信号
規則的な信号は、信号スペクトルから以下を保持することで TSA 信号から計算されます。
シャフト周波数とその高調波
ギア噛み合い周波数とその高調波
ギア噛み合い周波数とその高調波の '
NumSidebands' で指定された側波帯 (オプション)
tsaregular は、TSA 信号から Y を計算するために、シャフト回転数に 'NumSidebands' の値を掛けた値に相当する対象周波数周辺の帯域幅を使用します。規則的な信号と残差信号の関係は方程式 で表されます。規則的な信号で 1 次側波帯が保持される場合は、 となります。
振幅スペクトル
規則的な信号の振幅スペクトルは次のように計算されます。
ここで、Y は規則的な信号です。
参照
[1] McFadden, P.D. "Examination of a Technique for the Early Detection of Failure in Gears by Signal Processing of the Time Domain Average of the Meshing Vibration." Aero Propulsion Technical Memorandum 434. Melbourne, Australia: Aeronautical Research Laboratories, Apr. 1986.
[2] Večeř, P., Marcel Kreidl, and R. Šmíd. "Condition Indicators for Gearbox Monitoring Systems." Acta Polytechnica 45.6 (2005), pages 35-43.
[3] Zakrajsek, J. J., Townsend, D. P., and Decker, H. J. "An Analysis of Gear Fault Detection Methods as Applied to Pitting Fatigue Failure Data." Technical Memorandum 105950. NASA, Apr. 1993.
[4] Zakrajsek, James J. "An investigation of gear mesh failure prediction techniques." National Aeronautics and Space Administration Cleveland OH Lewis Research Center, 1989. No. NASA-E-5049.
拡張機能
バージョン履歴
R2018b で導入