pzmap
動的システムの極-零点配置図
説明
[ は、動的システム モデル p,z] = pzmap(sys)sys のシステムの極と伝達零点を返します。
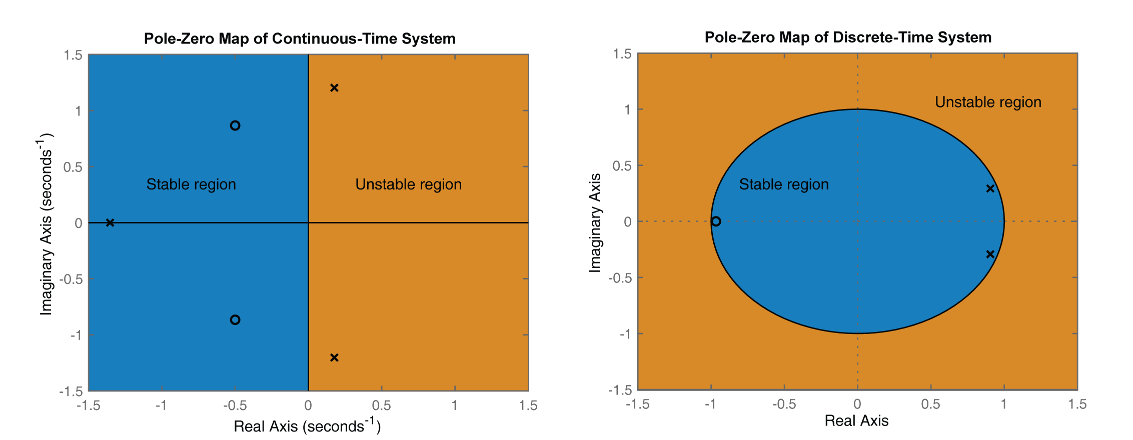
次の図は、連続時間 (左) と離散時間 (右) の線形時変モデルの極-零点配置図を示しています。
システム連続時間の場合、安定性を確実にするには複素 s 平面上のすべての極が左半平面 (青い領域) になければなりません。異なる極が虚軸上にある場合、つまり極の実数部がゼロである場合、システムは辛うじて安定しています。
離散時間システムの場合、複素 z 平面にあるすべての極が単位円 (青い領域) 内になければなりません。システムが単位円上に 1 つ以上の極をもつ場合、システムは辛うじて安定しています。
例
次の伝達関数で表される連続時間システムの極と零点をプロットします。
H = tf([2 5 1],[1 3 5]);
pzmap(H)
grid on
グリッドをオンにすると、一定の減衰比 (zeta) と一定の固有振動数 (wn) が線で表示されます。このシステムには、o でマークされる 2 つの実数零点がプロット上にあります。このシステムには x でマークされる複素数の極の組もあります。
離散時間の同定された状態空間 (idss) モデルの極-零点配置図をプロットします。実際には、システムの入出力測定値に基づいた推定で idss モデルを取得できます。この例では、状態空間データから 1 つ作成します。
A = [0.1 0; 0.2 -0.9];
B = [.1 ; 0.1];
C = [10 5];
D = [0];
sys = idss(A,B,C,D,'Ts',0.1);極-零点配置図を調べます。
pzmap(sys)

システムの極は x でマークされ、零点は o でマークされます。
この例では、伝達関数モデルの 3 行 1 列の配列を読み込みます。
load("tfArray.mat","sys"); size(sys)
3x1 array of transfer functions. Each model has 1 outputs and 1 inputs.
配列の各モデルの極と零点を異なる色でプロットします。この例では、配列の最初のモデルに赤、2 番目のモデルに緑、3 番目のモデルに青を使用します。
pzplot(sys(:,:,1),"r",sys(:,:,2),"g",sys(:,:,3),"b") grid

グリッドでは、極-零点プロットの s 平面上に一定の減衰比および固有振動数が線で表示されます。
pzmap を使用して次の伝達関数の極と零点を計算します。
sys = tf([4.2,0.25,-0.004],[1,9.6,17]); [p,z] = pzmap(sys)
p = 2×1
-7.2576
-2.3424
z = 2×1
-0.0726
0.0131
この例では、各階に 2 つの変位と 1 つの回転という 3 つの自由度がある 8 階建てのビルのモデルを使用します。これらのいずれかの変位に対する I/O 関係は 48 状態モデルとして表され、各状態は変位またはその変化率 (速度) を表します。
ビルのモデルを読み込みます。
load('building.mat');
size(G)State-space model with 1 outputs, 1 inputs, and 48 states.
システムの極と零点をプロットします。
pzmap(G)

プロットから、モデルを簡略化するためにモデル応答全体に影響を与えることなく消去が可能な、ほぼ相殺される極-零点のペアがいくつもあることがわかります。pzmap は、このようなほぼ相殺される極-零点のペアを視覚的に特定し、極-零点の簡略化を実行するのに役立ちます。
入力引数
出力引数
ヒント
MIMO モデルの場合、
pzmapは 1 つのプロットにすべてのシステムの極と伝達零点を表示します。個々の入出力ペアの極と零点をマッピングするには、iopzmapを使用します。極-零点プロットの外観をカスタマイズする追加オプションには、
pzplotを使用します。pzmapを使用して作成されたプロットは、複数行のタイトルや、string 配列または文字ベクトルの cell 配列として指定されたラベルをサポートしません。複数行のタイトルやラベルを指定するには、newline文字を含む単一の string を使用します。pzmap(sys,u,t) title("first line" + newline + "second line");