このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
ビジュアル知覚
機械学習と深層学習の手法を使用してオブジェクトを検出できます。ランダム サンプル コンセンサス (RANSAC) アルゴリズムを使用して放物線または 3 次の車線境界線をセグメント化、検出、モデル化することもできます。オブジェクトを検出した後に、Automated Driving Toolbox™ の関数を使用して、検出を評価および可視化します。
関数
注目の例

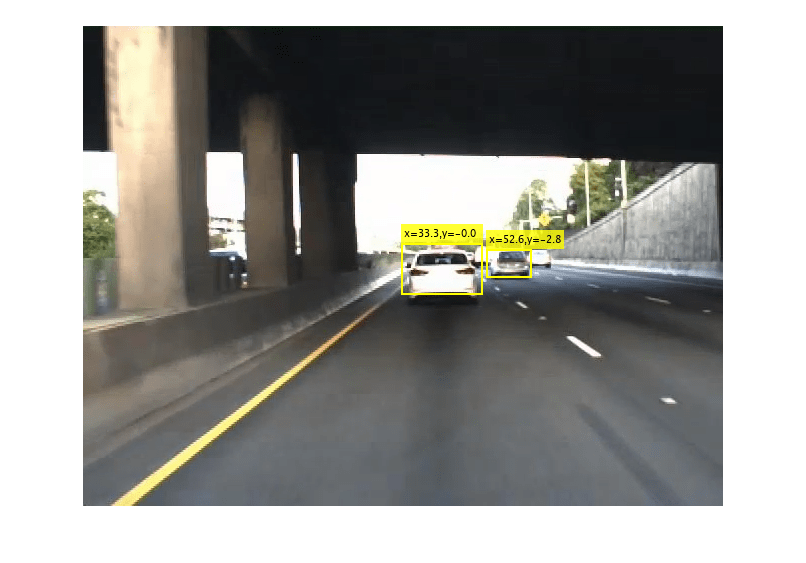
Visual Perception Using Monocular Camera
Construct a monocular camera sensor simulation capable of lane boundary and vehicle detections.
Generate Code for Lane Marker Detector
Generate C++ code for lane marker detector and validate the functional equivalence using software-in-the-loop (SIL) simulation.
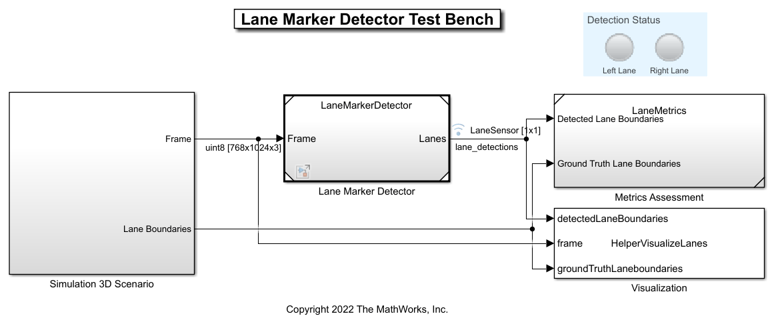
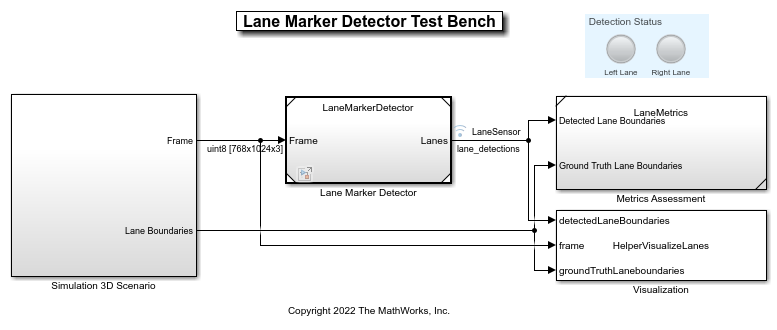
Automate Testing for Lane Marker Detector
Automate the testing of a lane marker detector algorithm and generated code.

深層学習車両検出器の学習
深層学習を使用して視覚ベースの車両検出器に学習させる
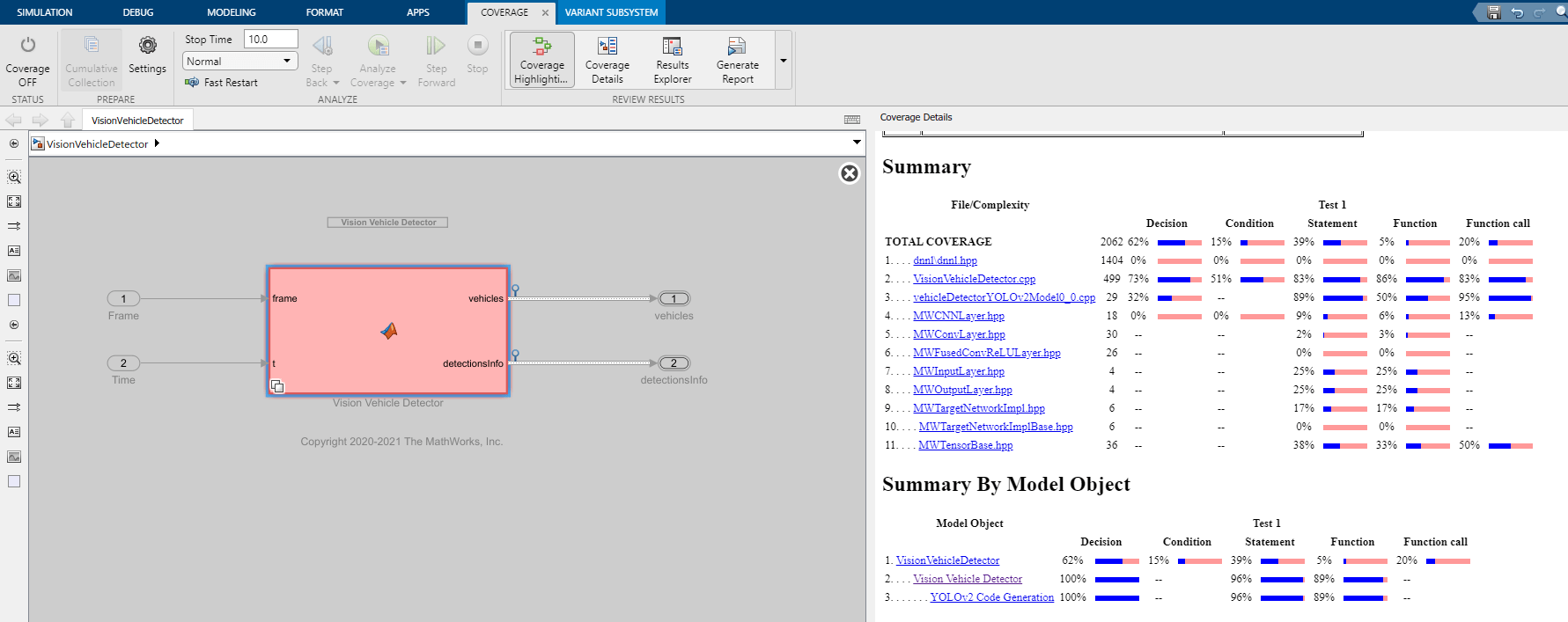
Generate Code for Vision Vehicle Detector
Generate deployable code for a monocular-camera-based vehicle detector and validate the functional equivalence with simulation.
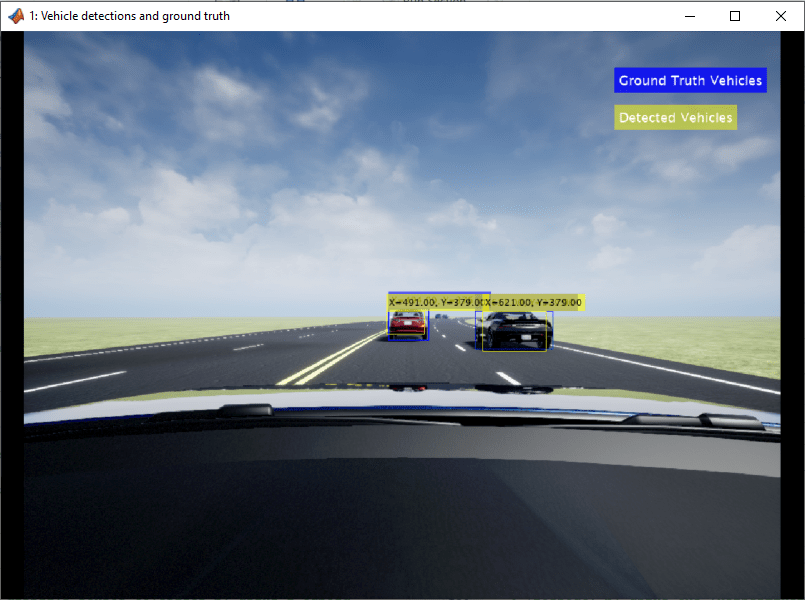
Automate Testing for Vision Vehicle Detector
Automate the testing of a vehicle detector and generated code.
Track Multiple Vehicles Using a Camera
Detect and track multiple vehicles with a monocular camera mounted in a vehicle.

Perception-Based Parking Spot Detection Using Unreal Engine Simulation
Build a bird's-eye-view map of a parking lot using semantically segmented images from the ego vehicle camera, and detect empty parking spots from the map.
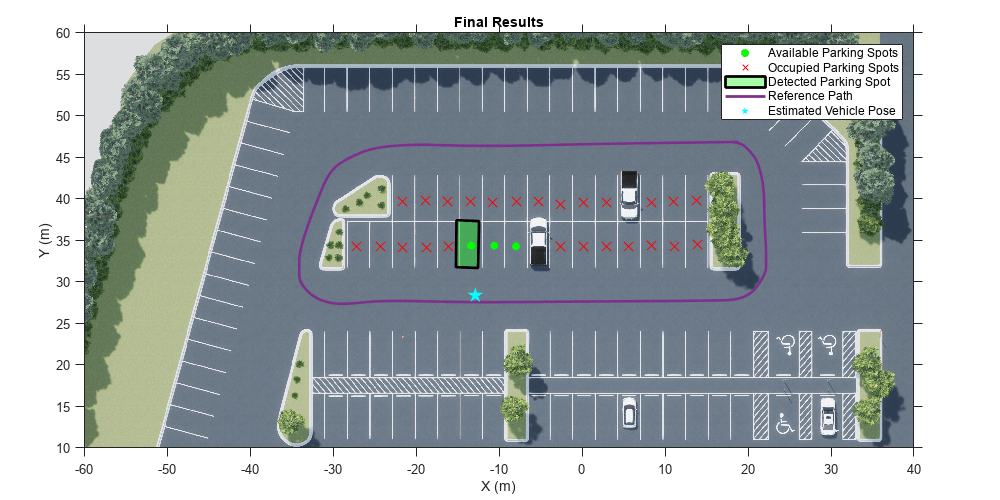
Perception Based Live Parking Spot Detection Using Unreal Engine Simulation
Develop a live parking spot detection system using deep learning and SLAM.