objectDetectorTrainingData
オブジェクト検出器用の学習データの作成
構文
説明
[ は、指定されたグラウンド トゥルースからイメージ データストアとボックス ラベル データストアの学習データを作成します。この関数は、1 つ以上の注釈付きオブジェクトを含むイメージのみをグラウンド トゥルース入力から選択します。imds,blds] = objectDetectorTrainingData(gTruth)
combine(imds,blds) を使用してイメージとボックス ラベルのデータストアを統合し、学習に必要なデータストアを作成することができます。統合されたデータストアは、trainACFObjectDetector、trainYOLOv2ObjectDetector、trainYOLOv3ObjectDetector、および trainYOLOv4ObjectDetector などの学習関数で使用します。
この関数は、複数の MATLAB® ワーカーを使用する並列計算をサポートします。Computer Vision Toolbox の基本設定 ダイアログを使用して並列計算を有効にします。
trainingDataTable = objectDetectorTrainingData(gTruth)gTruth は、groundTruth オブジェクトの配列です。table は、Computer Vision Toolbox™ の学習関数を使用したオブジェクト検出器の学習に使用できます。
[___] = objectDetectorTrainingData( は、前の構文にある引数の任意の組み合わせに加えて、名前と値の引数を 1 つ以上使用してオプションを指定します。たとえば、gTruth,Name=Value)Verbose=True は、ワークスペース環境への表示を有効にします。
gTruth の groundTruth オブジェクトを、ビデオ ファイル、カスタム データ ソース、または異なるカスタム読み取り関数を指定した imageDatastore オブジェクトを使用して作成する場合、任意の組み合わせの名前と値の引数を指定できます。イメージ コレクションまたはイメージ シーケンス データ ソースから groundTruth オブジェクトを作成した場合は、SamplingFactor と LabelType の名前と値の引数のみ指定できます。
例
YOLO v2 ネットワークに基づいて車両検出器に学習させます。
学習イメージを含むフォルダーをワークスペースに追加します。
imageDir = fullfile(matlabroot,"toolbox","vision","visiondata","vehicles"); addpath(imageDir);
車両のグラウンド トゥルース データを読み込みます。
data = load("vehicleTrainingGroundTruth.mat");
gTruth = data.vehicleTrainingGroundTruth;グラウンド トゥルース オブジェクトを使用して、イメージ データストアとボックス ラベル データストアを作成します。
[imds,bxds] = objectDetectorTrainingData(gTruth);
データストアを統合します。
cds = combine(imds,bxds);
学習用の dlnetwork オブジェクトを含む検出器を読み込みます。
load("yolov2VehicleDetectorNet.mat","net"); classes = "vehicle"; aboxes = [8 8; 32 48; 40 24; 72 48]; detector = yolov2ObjectDetector(net,classes,aboxes);
学習オプションを設定します。
options = trainingOptions("sgdm", ... InitialLearnRate=0.001, ... Verbose=true, ... MiniBatchSize=16, ... MaxEpochs=30, ... Shuffle="every-epoch", ... VerboseFrequency=10);
検出器に学習させます。
[detector,info] = trainYOLOv2ObjectDetector(cds,detector,options);
************************************************************************* Training a YOLO v2 Object Detector for the following object classes: * vehicle Training on single CPU. |========================================================================================| | Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Base Learning | | | | (hh:mm:ss) | RMSE | Loss | Rate | |========================================================================================| | 1 | 1 | 00:00:00 | 7.17 | 51.4 | 0.0010 | | 1 | 10 | 00:00:02 | 1.78 | 3.2 | 0.0010 | | 2 | 20 | 00:00:05 | 1.57 | 2.5 | 0.0010 | | 2 | 30 | 00:00:07 | 1.40 | 1.9 | 0.0010 | | 3 | 40 | 00:00:10 | 1.11 | 1.2 | 0.0010 | | 3 | 50 | 00:00:12 | 1.28 | 1.6 | 0.0010 | | 4 | 60 | 00:00:14 | 0.96 | 0.9 | 0.0010 | | 4 | 70 | 00:00:17 | 0.90 | 0.8 | 0.0010 | | 5 | 80 | 00:00:19 | 0.79 | 0.6 | 0.0010 | | 5 | 90 | 00:00:22 | 0.83 | 0.7 | 0.0010 | | 6 | 100 | 00:00:24 | 0.84 | 0.7 | 0.0010 | | 7 | 110 | 00:00:26 | 0.57 | 0.3 | 0.0010 | | 7 | 120 | 00:00:28 | 0.62 | 0.4 | 0.0010 | | 8 | 130 | 00:00:31 | 0.59 | 0.3 | 0.0010 | | 8 | 140 | 00:00:33 | 0.56 | 0.3 | 0.0010 | | 9 | 150 | 00:00:35 | 0.54 | 0.3 | 0.0010 | | 9 | 160 | 00:00:38 | 0.54 | 0.3 | 0.0010 | | 10 | 170 | 00:00:40 | 0.62 | 0.4 | 0.0010 | | 10 | 180 | 00:00:42 | 0.53 | 0.3 | 0.0010 | | 11 | 190 | 00:00:44 | 0.58 | 0.3 | 0.0010 | | 12 | 200 | 00:00:46 | 0.45 | 0.2 | 0.0010 | | 12 | 210 | 00:00:49 | 0.52 | 0.3 | 0.0010 | | 13 | 220 | 00:00:51 | 0.53 | 0.3 | 0.0010 | | 13 | 230 | 00:00:53 | 0.49 | 0.2 | 0.0010 | | 14 | 240 | 00:00:55 | 0.50 | 0.2 | 0.0010 | | 14 | 250 | 00:00:57 | 0.44 | 0.2 | 0.0010 | | 15 | 260 | 00:00:59 | 0.50 | 0.3 | 0.0010 | | 15 | 270 | 00:01:02 | 0.56 | 0.3 | 0.0010 | | 16 | 280 | 00:01:04 | 0.55 | 0.3 | 0.0010 | | 17 | 290 | 00:01:06 | 0.46 | 0.2 | 0.0010 | | 17 | 300 | 00:01:08 | 0.40 | 0.2 | 0.0010 | | 18 | 310 | 00:01:10 | 0.50 | 0.3 | 0.0010 | | 18 | 320 | 00:01:12 | 0.51 | 0.3 | 0.0010 | | 19 | 330 | 00:01:14 | 0.44 | 0.2 | 0.0010 | | 19 | 340 | 00:01:16 | 0.47 | 0.2 | 0.0010 | | 20 | 350 | 00:01:19 | 0.43 | 0.2 | 0.0010 | | 20 | 360 | 00:01:22 | 0.51 | 0.3 | 0.0010 | | 21 | 370 | 00:01:25 | 0.46 | 0.2 | 0.0010 | | 22 | 380 | 00:01:27 | 0.49 | 0.2 | 0.0010 | | 22 | 390 | 00:01:30 | 0.53 | 0.3 | 0.0010 | | 23 | 400 | 00:01:32 | 0.49 | 0.2 | 0.0010 | | 23 | 410 | 00:01:34 | 0.38 | 0.1 | 0.0010 | | 24 | 420 | 00:01:36 | 0.48 | 0.2 | 0.0010 | | 24 | 430 | 00:01:39 | 0.40 | 0.2 | 0.0010 | | 25 | 440 | 00:01:41 | 0.44 | 0.2 | 0.0010 | | 25 | 450 | 00:01:43 | 0.41 | 0.2 | 0.0010 | | 26 | 460 | 00:01:45 | 0.46 | 0.2 | 0.0010 | | 27 | 470 | 00:01:47 | 0.51 | 0.3 | 0.0010 | | 27 | 480 | 00:01:49 | 0.49 | 0.2 | 0.0010 | | 28 | 490 | 00:01:51 | 0.48 | 0.2 | 0.0010 | | 28 | 500 | 00:01:54 | 0.44 | 0.2 | 0.0010 | | 29 | 510 | 00:01:56 | 0.27 | 7.3e-02 | 0.0010 | | 29 | 520 | 00:01:58 | 0.37 | 0.1 | 0.0010 | | 30 | 530 | 00:02:00 | 0.32 | 0.1 | 0.0010 | | 30 | 540 | 00:02:02 | 0.33 | 0.1 | 0.0010 | |========================================================================================| Training finished: Max epochs completed. Detector training complete. *************************************************************************
テスト イメージを読み取ります。
I = imread("detectcars.png");検出器を実行します。
[bboxes,scores] = detect(detector,I);
結果を表示します。
if(~isempty(bboxes)) I = insertObjectAnnotation(I,"rectangle",bboxes,scores); end figure imshow(I)
学習データを使用して、ACF ベースの一時停止標識用オブジェクト検出器に学習させます。
イメージを含むフォルダーを MATLAB® パスに追加します。
imageDir = fullfile(matlabroot, 'toolbox', 'vision', 'visiondata', 'stopSignImages'); addpath(imageDir);
グラウンド トゥルース データを読み込みます。これには、一時停止標識と自動車のデータが含まれます。
load('stopSignsAndCarsGroundTruth.mat','stopSignsAndCarsGroundTruth')
ラベルの定義を表示して、グラウンド トゥルースに含まれるラベル タイプを確認します。
stopSignsAndCarsGroundTruth.LabelDefinitions
ans=3×3 table
Name Type Group
____________ _________ ________
{'stopSign'} Rectangle {'None'}
{'carRear' } Rectangle {'None'}
{'carFront'} Rectangle {'None'}
学習用の一時停止標識データを選択します。
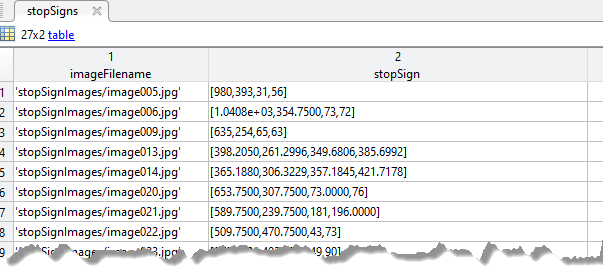
stopSignGroundTruth = selectLabelsByName(stopSignsAndCarsGroundTruth,'stopSign');一時停止標識オブジェクト検出器のための学習データを作成します。
trainingData = objectDetectorTrainingData(stopSignGroundTruth); summary(trainingData)
trainingData: 41×2 table
Variables:
imageFilename: cell array of character vectors
stopSign: cell
Statistics for applicable variables:
NumMissing
imageFilename 0
stopSign 0
ACF ベースのオブジェクト検出器に学習させます。
acfDetector = trainACFObjectDetector(trainingData,'NegativeSamplesFactor',2);ACF Object Detector Training The training will take 4 stages. The model size is 34x31. Sample positive examples(~100% Completed) Compute approximation coefficients...Completed. Compute aggregated channel features...Completed. -------------------------------------------- Stage 1: Sample negative examples(~100% Completed) Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 19 weak learners. -------------------------------------------- Stage 2: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 20 weak learners. -------------------------------------------- Stage 3: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 54 weak learners. -------------------------------------------- Stage 4: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 61 weak learners. -------------------------------------------- ACF object detector training is completed. Elapsed time is 12.6005 seconds.
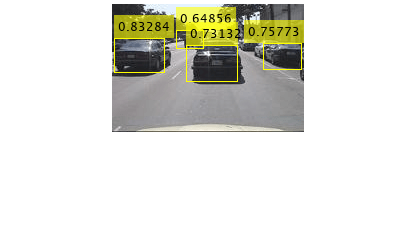
ACF ベースの検出器をサンプル イメージでテストします。
I = imread('stopSignTest.jpg');
bboxes = detect(acfDetector,I);
検出したオブジェクトを表示します。
annotation = acfDetector.ModelName;
I = insertObjectAnnotation(I,'rectangle',bboxes,annotation);
figure
imshow(I)
パスからイメージ フォルダーを削除します。
rmpath(imageDir);
イメージの場所、ラベルの定義、およびラベル データを読み込みます。
data = load('labelsWithAttributes.mat'); images = fullfile(matlabroot,'toolbox','vision','visiondata','stopSignImages', data.imageFilenames);
グラウンド トゥルース オブジェクトを作成します。
dataSource = groundTruthDataSource(images); gTruth = groundTruth(groundTruthDataSource(images), data.labeldefs, data.labelData);
グラウンド トゥルース オブジェクトを使用して、イメージ データストア、ボックス ラベル データストア、および配列データストアを作成します。
[imds, blds, arrds] = objectDetectorTrainingData(gTruth);
すべての属性を読み取ります。
readall(arrds)
ans=2×1 cell array
{1×1 struct}
{1×1 struct}
入力引数
名前と値の引数
出力引数
イメージ データストア。gTruth オブジェクトから抽出されたイメージを含む imageDatastore オブジェクトとして返されます。imds 内のイメージには、注釈付きラベルのクラスが少なくとも 1 つ含まれています。関数は、注釈が付けられていないイメージを無視します。
ボックス ラベル データストア。boxLabelDatastore オブジェクトとして返されます。データストアには、ROI ラベル名の categorical ベクトルと、M 個の境界ボックスの M 行 4 列の行列が含まれています。境界ボックスの位置とサイズは、[x,y,width,height] 形式の double の M x 4 要素ベクトルとして表されます。
配列データ ストア。struct 配列として返されます。struct のフィールドには、ボックス ラベル データストア blds 内の対応するラベルの属性とサブラベル名が格納されます。サブラベル データは、サブラベル属性に対応するフィールドとともに、Position フィールドを使用して struct にパッケージ化されます。
学習データの table。2 列以上の table として返されます。table の最初の列には、パスを含むイメージ ファイル名が含まれています。imread でサポートされている任意の形式のグレースケールまたはトゥルーカラー (RGB) イメージを指定できます。残りの各列は、ROI ラベルに対応し、そのラベルのイメージにおける境界ボックスの位置 (最初の列で指定) が含まれます。境界ボックスは、[x,y,width,height] の形式で M 個の境界ボックスの M 行 4 列の行列として指定します。[x,y] は左上隅の位置を指定します。グラウンド トゥルース table の作成には、イメージ ラベラーアプリまたはビデオ ラベラー アプリを使用できます。
出力 table は、入力 gTruth オブジェクトに存在するサブラベルや属性データを無視します。
バージョン履歴
R2017a で導入参考
アプリ
関数
trainACFObjectDetector|trainYOLOv2ObjectDetector|trainYOLOv3ObjectDetector|trainYOLOv4ObjectDetector|estimateAnchorBoxes
オブジェクト
トピック
- 深層学習用のデータストア (Deep Learning Toolbox)
- オブジェクト検出およびセマンティック セグメンテーション用の学習データ