groundTruth
グラウンド トゥルース ラベル データ
説明
groundTruth オブジェクトには、一連のグラウンド トゥルース ラベルのデータ ソース、ラベルの定義、およびマークされたラベルの注釈に関する情報が含まれます。groundTruth オブジェクトは、イメージ ラベラー アプリおよびビデオ ラベラー アプリからエクスポートまたはインポートできます。groundTruth オブジェクトに保存されているデータの概要については、Elements of Ground Truth Objectsを参照してください。
groundTruthオブジェクトの配列からオブジェクト検出器の学習データを作成するには、関数objectDetectorTrainingDataを使用します。groundTruthオブジェクトの配列からセマンティック セグメンテーション ネットワークの学習データを作成するには、関数pixelLabelTrainingDataを使用します。
作成
ラベル付けアプリから groundTruth オブジェクトをエクスポートするには、アプリのツールストリップで、[ラベルをエクスポート] 、 [ワークスペースへ] を選択します。アプリがオブジェクトを MATLAB® ワークスペースにエクスポートします。プログラムで groundTruth オブジェクトを作成するには、関数 groundTruth を使用します (ここで説明します)。
説明
gTruth = groundTruth(dataSource,labelDefs,labelData)
dataSourceでは、グラウンド トゥルース データのソースを指定し、DataSourceプロパティを設定します。labelDefsでは、グラウンド トゥルース データのラベル、サブラベル、および属性の定義を指定し、LabelDefinitionsプロパティを設定します。labelDataでは、マークされたラベルの識別情報、位置、およびタイムスタンプを指定し、LabelDataプロパティを設定します。
プロパティ
グラウンド トゥルース データのソース。groundTruthDataSource オブジェクトとして指定します。オブジェクトには、ビデオ、イメージ シーケンス、またはグラウンドトゥルース データがラベル付けされたカスタムのデータ ソースを記述する情報が含まれます。
元のデータ ソースからイメージにアクセスするには、VideoReader または imageDatastore を使用します。また、カスタム読み取り関数を使用することもできます。詳細については、ラベル付けでのカスタム イメージ ソース リーダーの使用を参照してください。
この プロパティ は読み取り専用です。
ラベルの定義。table として指定します。このテーブルを作成するには、次のいずれかの方法を使用します。
ラベル付けアプリのいずれかにおいてラベルの定義を作成し、それを
groundTruthオブジェクトの一部としてエクスポートします。labelDefinitionCreatorオブジェクトを使用して、ラベルの定義 table を生成します。この table を MAT ファイルに保存すると、ラベルの定義をラベル付けアプリのセッションに読み込めます。アプリのツールストリップで、[読み込み] 、 [ラベルの定義] を選択してください。ラベルの定義 table を MATLAB コマンド ラインで作成します。
次の表に、LabelDefinitions プロパティに指定するテーブルの必須およびオプションの列を示します。
| 列 | 説明 | 必須またはオプション |
|---|---|---|
Name | 各ラベルの定義の名前を指定する文字列または文字ベクトル。 | 必須 |
Type | 各ラベルの定義のタイプを指定する labelType 列挙。Rectangle、Scene など。 | 必須 |
LabelColor | ラベルの定義の色を指定する RGB 3 成分の 1 行 3 列の行ベクトル。値は [0, 1] の範囲内です。黄色 (RGB 3 成分 [1 1 0]) は、ラベル付けアプリにおける選択ラベルの色として予約されています。 | オプション ラベル付けアプリでラベルを定義する場合、色を指定しなければなりません。そのため、エクスポートされるラベルの定義 table には必ずこの列が含まれます。
|
PixelLabelID | スカラー、列ベクトル、または整数値ラベル ID の M 行 3 列の行列。PixelLabelID は、ラベルの定義を表すために使用されるピクセル ラベル値を指定します。ピクセル ラベル ID の値は 0 ~ 255 の範囲でなければなりません。 | オプション ラベル付けアプリまたは ラベルの定義 table を MATLAB コマンド ラインで作成するときに、いずれかのラベルの |
Group | 各ラベルの定義が属するグループを指定する文字列または文字ベクトル。 | オプション ラベルの定義 table を MATLAB コマンド ラインで作成する場合、 ラベル付けアプリからラベルの定義をエクスポートする場合や、 |
Description | 各ラベルの定義について説明する文字列または文字ベクトル。 | オプション ラベルの定義テーブルを MATLAB コマンド ラインで作成する場合、 ラベル付けアプリからラベルの定義をエクスポートする場合や、 |
Hierarchy | 各ラベルの定義のサブラベルと属性データを含む構造体。Hierarchy の形式の例については、イメージ ラベラー入門またはビデオ ラベラー入門を参照してください。 | オプション ラベル付けアプリでサブラベルまたは属性を定義する場合、エクスポートされる |
たとえば、Sky、Vegetation、Lanes、StopSign、および Vehicle という名前のラベルの定義をもつ table について考えます。これがビデオ ラベラー アプリからエクスポートされたものとします。
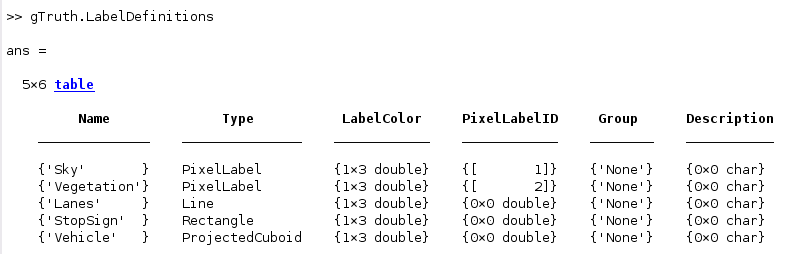
ラベルの定義にはピクセル ラベルが含まれているため、table には
PixelLabelID列があります。ラベルのうち 2 つに属性があるため、アプリは
Hierarchy列を作成しました。これがすべてのラベルの定義に適用されています。ラベルの定義にはグループが割り当てられていないため、すべてのラベルの定義の
Group列が'None'になっています。
メモ
ラベラー アプリは、ピクセル ID が 1 ~ 255 のピクセル データのみを読み込むことができます。
この プロパティ は読み取り専用です。
各 ROI とシーン ラベルのラベル データ。イメージ コレクションの場合は table、ビデオまたはイメージ シーケンスの場合は timetable として指定します。LabelData の各列が 1 つのラベルの定義のラベルを保持し、LabelDefinitions の各行の Name の値に対応します。これらの LabelData はテーブルの要素を表します。ラベル カテゴリは labelType 列挙として指定されます。
または、ラベル タイプごとにグループ化された ROI ラベル データの場合、ROILabelData というラベルの付いた単一の列を使用して、RectangleData、PolygonData、LineData、ProjCuboidData のうち少なくとも 1 つのラベル タイプを含む構造体として指定できます。
各ラベル タイプのストレージ形式を表に示します。
| ラベル タイプ | 各タイムスタンプでのラベルのストレージ形式 |
|---|---|
labelType.Rectangle |
|
labelType.RotatedRectangle | 1 つ以上の回転した四角形の場合、空間座標で M 行 5 列の数値行列として指定します。ここで、各行は [xctr yctr w h yaw] 形式の回転した四角形を指定します。
|
|
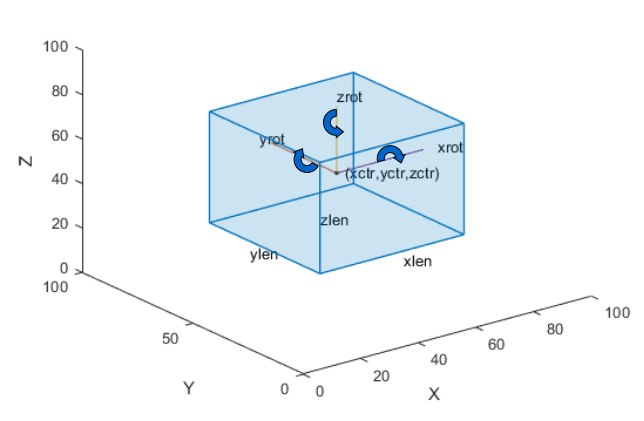
次の図は、これらの値で直方体の位置がどのように決定されるかを示しています。
|
|
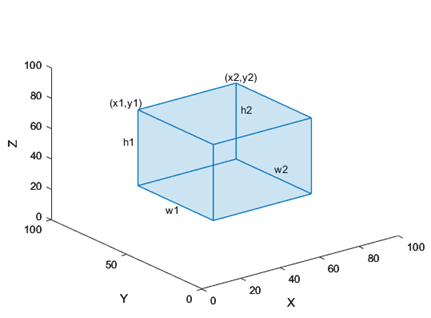
次の図は、これらの値で直方体の位置がどのように決定されるかを示しています。
|
labelType.Line | cell 配列の |
labelType.PixelLabel | すべてのピクセル ラベルの定義のラベル データは、M 個のイメージまたはフレームについて、M 行 1 列の単一の |
labelType.Polygon | cell 配列の |
labelType.Custom | ラベルは、timetable で指定されているとおりに正確に保存されます。カスタム ラベル データを含む groundTruthMultisignal オブジェクトをグラウンド トゥルース ラベラー アプリにインポートする場合、このデータはアプリにインポートされません。学習用のラベル データを収集し、アプリでラベル付けされたデータと組み合わせる場合は、カスタム データを使用します。 |
labelType.Scene | logical として保存されます。 |

ネイティブでサポートされている ROI または Scene ラベル カテゴリのいずれにも含まれていないグラウンド トゥルース データを groundTruth オブジェクトに追加するには、Custom の labelType を使用するラベルの定義を指定しなければなりません。カスタム データは、ラベル付けアプリに読み込むときに表示されません。
オブジェクト関数
selectLabelsByGroup | Select ground truth labels by label group |
selectLabelsByType | Select ground truth labels by label type |
selectLabelsByName | Select ground truth labels by label name |
changeFilePaths | Change file paths in ground truth data |
gatherLabelData | Gather label data from ground truth |
writeFrames | Write ground truth video frames to disk |
merge | Merge two or more ground truth objects |
例
ヒント
ビデオベースのデータ ソースの
groundTruthオブジェクトは、オペレーティング システムのビデオ読み取り機能に依存します。ビデオ データ ソースを使用して作成されたgroundTruthオブジェクトは、そのオブジェクトを作成するために使用された同じプラットフォームでのみ整合性を維持します。プラットフォーム固有のgroundTruthオブジェクトを作成するには、ビデオをイメージのシーケンスに変換し、関連付けられたタイムスタンプをイメージのシーケンスに含めます。
バージョン履歴
R2017a で導入