trainCascadeObjectDetector
カスケード型オブジェクト検出器モデルの学習
構文
説明
trainCascadeObjectDetector( は、学習済みのカスケード検出器を outputXMLFilename,positiveInstances,negativeImages)outputXMLFilename という名前の XML ファイルに書き込みます。ファイル名には XML 拡張子が含まれていなければなりません。この関数の動作の詳細については、カスケード型オブジェクト検出器入門を参照してください。
trainCascadeObjectDetector( は、中断された学習セッションを再開します。outputXMLFilename,'resume')outputXMLFilename 入力は、中断されたセッションの出力ファイル名と一致していなければなりません。前のセッションで保存されたすべての引数が自動的に再利用されます。
trainCascadeObjectDetector(___, は、前の構文にある引数の任意の組み合わせに加えて、名前と値の引数を 1 つ以上使用してオプションを指定します。たとえば、Name=Value)ObjectTrainingSize=[100,100] は、学習中のオブジェクトの高さと幅を設定します。
例
MAT ファイルからポジティブ サンプル データを読み込みます。このファイルにはグラウンド トゥルースが含まれています。いくつかのオブジェクト カテゴリに対する境界ボックスの table として指定します。このグラウンド トゥルースは、イメージ ラベラー アプリからラベル付けしてエクスポートされています。
load("stopSignsAndCars.mat");一時停止標識のイメージの前に絶対パスを付けます。
stopSigns = fullfile(toolboxdir("vision"),"visiondata",stopSignsAndCars{:,1});
データストアを作成して、一時停止標識のグラウンド トゥルース データを読み込みます。
imds = imageDatastore(stopSigns); blds = boxLabelDatastore(stopSignsAndCars(:,2));
イメージ データストアとボックス ラベル データストアを組み合わせます。
positiveInstances = combine(imds,blds);
MATLAB® パスにイメージ フォルダーのパスを追加します。
imDir = fullfile(matlabroot,"toolbox","vision","visiondata","stopSignImages"); addpath(imDir);
ネガティブ イメージのフォルダーを指定します。
negativeFolder = fullfile(matlabroot,"toolbox","vision","visiondata","nonStopSigns");
ネガティブ イメージを含む imageDatastore オブジェクトを作成します。
negativeImages = imageDatastore(negativeFolder);
HOG 特徴を使用して "stopSignDetector.xml" という名前のカスケード型オブジェクト検出器に学習させます。メモ: コマンドの実行には数分かかる場合があります。
trainCascadeObjectDetector("stopSignDetector.xml",positiveInstances,negativeFolder,FalseAlarmRate=0.01,NumCascadeStages=3);Automatically setting ObjectTrainingSize to [35, 32] Using at most 42 of 42 positive samples per stage Using at most 84 negative samples per stage --cascadeParams-- Training stage 1 of 3 [........................................................................] Used 42 positive and 84 negative samples Time to train stage 1: 0 seconds Training stage 2 of 3 [........................................................................] Used 42 positive and 84 negative samples Time to train stage 2: 0 seconds Training stage 3 of 3 [........................................................................] Used 42 positive and 84 negative samples Time to train stage 3: 1 seconds Training complete
新たに学習させた分類器を使用して、イメージ内の一時停止標識を検出します。
detector = vision.CascadeObjectDetector("stopSignDetector.xml");テスト イメージを読み取ります。
img = imread("stopSignTest.jpg");テスト イメージ内の一時停止標識を検出します。
bbox = step(detector,img);
境界ボックスの四角形を挿入し、マークしたイメージを返します。
detectedImg = insertObjectAnnotation(img,"rectangle",bbox,"stop sign");
検出した一時停止標識を表示します。
figure imshow(detectedImg)

パスからイメージ フォルダーを削除します。
rmpath(imDir);
入力引数
ポジティブ サンプル。データストアまたは 2 列の table として指定します。
データストアを使用する場合は、関数
readおよび関数readallを使用してデータストアを呼び出すと、cell 配列か、列が少なくとも 2 つある table が返されるよう、データを設定しなければなりません。この表は、列に含まれるデータを示しています。Images boxes labels (optional) グレースケールまたは RGB イメージの cell ベクトル。
[x, y, width, height] の形式の境界ボックスで構成される M 行 4 列の行列。ここで、[x,y] は境界ボックスの左上の座標を表します。
オブジェクト クラス名を含む M 要素の categorical ベクトルを含む cell 配列。データストアが返すすべての categorical データには、同じカテゴリが含まれていなければなりません。
このデータを提供すると、関数はクラス ラベルを使用して、
vision.CascadeObjectDetectorオブジェクトとして指定された学習済みの検出器のClassificationModelプロパティを埋めます。それ以外の場合、カスケード型オブジェクト検出器は単一クラスの検出器であるため、学習にクラス ラベルは必要ありません。table を使用する場合、table は 2 列以上でなければなりません。table の最初の列には、パスを含むイメージ ファイル名が含まれていなければなりません。イメージは、グレースケールまたはトゥルーカラー (RGB) でなければならず、
imreadでサポートされている任意の形式を指定できます。残りの各列は、vehicle、flower、stop sign などの単一のオブジェクト クラスを表す M 行 4 列の行列を含む cell ベクトルでなければなりません。これらの列には、[x,y,width,height] 形式の、M 個の境界ボックスの 4 要素 double 配列が含まれます。この形式は、対応するイメージでの境界ボックスの左上隅の位置とサイズを指定します。グラウンド トゥルース table の作成には、イメージ ラベラーアプリまたはビデオ ラベラー アプリを使用できます。生成されたグラウンド トゥルースから学習データの table を作成するには、関数objectDetectorTrainingDataを使用します。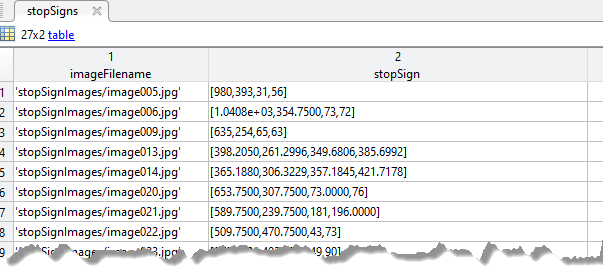
ネガティブ イメージ。ImageDatastore オブジェクト、イメージを含むフォルダーへのパス、またはイメージ ファイル名の cell 配列として指定します。イメージを使用してネガティブ サンプルが生成されるため、イメージには対象オブジェクトを含めないでください。代わりに、オブジェクトに関連付けられた背景を含めるようにします。
学習済みのカスケード検出器のファイル名。XML 拡張子付きの文字ベクトルまたは string スカラーとして指定します。たとえば、'stopSignDetector.xml' とします。
データ型: char
名前と値の引数
ヒント
良質の検出器の学習には数千単位の学習サンプルが必要です。大量のデータを処理する時間は場合によって異なりますが、数時間から数日に及ぶ長い時間がかかります。学習中は、関数によって各ステージの学習にかかった時間が MATLAB® のコマンド ウィンドウに表示されます。
この関数で使用される OpenCV HOG パラメーターは次のとおりです。
Numbins:
9CellSize =
[8 8]BlockSize =
[4 4]BlockOverlap =
[2 2]UseSignedOrientation =
false
参照
[1] Viola, P., and M. Jones. “Rapid Object Detection using a Boosted Cascade of Simple Features.” Proceedings of the 2001 IEEE Computer Society Conference. CVPR 2001, 1:I-511-I–518. Kauai, HI, USA: IEEE Comput. Soc, 2001.
[2] Ojala, T., M. Pietikainen, and T. Maenpaa. “Multiresolution Gray-scale and Rotation Invariant Texture Classification With Local Binary Patterns.” In IEEE Transactions on Pattern Analysis and Machine Intelligence, no. 7: 971–87, 2002. DOI.org (Crossref), https://doi.org/10.1109/TPAMI.2002.1017623.
[3] Dalal, N., and B. Triggs. “Histograms of Oriented Gradients for Human Detection.” In 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR '05), 1:886–93. San Diego, CA, USA: IEEE, 2005. DOI.org (Crossref), https://doi.org/10.1109/CVPR.2005.177.
[4] Lienhart, R., Kuranov, A., Pisarevsky, V.. “Empirical Analysis of Detection Cascades of Boosted Classifiers for Rapid Object Detection” DAGM 2003. Lecture Notes in Computer Science. 2781:297-304. Springer, 2003. DOI.org (Crossref), https://doi.org/10.1007/978-3-540-45243-0_39.