vehicleDetectorACF
集約チャネル特徴を使用した車両検出器の読み込み
説明
detector = vehicleDetectorACFacfObjectDetector オブジェクトは、車両の前側、後ろ側、左側、右側の隠れている部分のないイメージを使用して学習しています。
例
事前学習済みの車両検出器を読み込みます。
detector = vehicleDetectorACF('front-rear-view');イメージを読み込んで、検出器を実行します。
I = imread('highway.png');
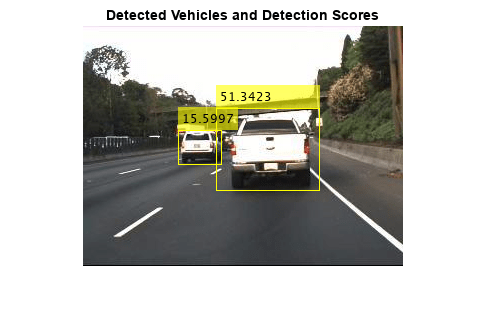
[bboxes,scores] = detect(detector,I);イメージ内で検出された車両の境界ボックスとスコアを重ね合わせます。
I = insertObjectAnnotation(I,'rectangle',bboxes,scores); figure imshow(I) title('Detected Vehicles and Detection Scores')
入力引数
出力引数
バージョン履歴
R2017a で導入