vision.PeopleDetector
(削除済み) HOG 特徴を使用した直立の人物の検出
vision.PeopleDetectorpeopleDetectorACF 関数を使用して人物を検出します。
説明
人物検出器オブジェクトは、勾配方向ヒストグラム (HOG) 特徴と学習済みサポート ベクター マシン (SVM) 分類器を使用して、入力イメージ内の人物を検出します。このオブジェクトは、隠れていない、直立姿勢の人物を検出します。
イメージ内の人物を検出するには、次の手順を実行します。
vision.PeopleDetectorオブジェクトを作成し、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
構文
説明
peopleDetector = vision.PeopleDetectorpeopleDetector を返します。
peopleDetector = vision.PeopleDetector(model)ClassificationModel プロパティを model に設定します。
peopleDetector = vision.PeopleDetector(Name,Value)peopleDetector = vision.PeopleDetector('ClassificationModel','UprightPeople_128x64') です。
プロパティ
使用法
説明
bboxes = peopleDetector(I)I でマルチスケール オブジェクト検出を実行して、M 境界ボックスを定義する M 行 4 列の行列を返します。M は検出された人物の数を表します。出力行列 BBOXES の各行には、4 要素ベクトル [x y width height] が含まれます。このベクトルは、境界ボックスの左上隅とサイズをピクセル単位で指定します。人物が検出されない場合、オブジェクトは空のベクトルを返します。入力イメージ I は、グレースケール イメージまたはトゥルーカラー (RGB) イメージでなければなりません。
[ は、検出の信頼度の値も返します。bboxes, scores] = peopleDetector(I)
入力引数
出力引数
オブジェクト関数
オブジェクト関数を使用するには、System object™ を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、次の構文を使用します。
release(obj)
例
人物検出器を作成して、入力イメージを読み込みます。
peopleDetector = vision.PeopleDetector; I = imread('visionteam1.jpg');人物検出器オブジェクトを使用して人物を検出します。
[bboxes,scores] = peopleDetector(I);
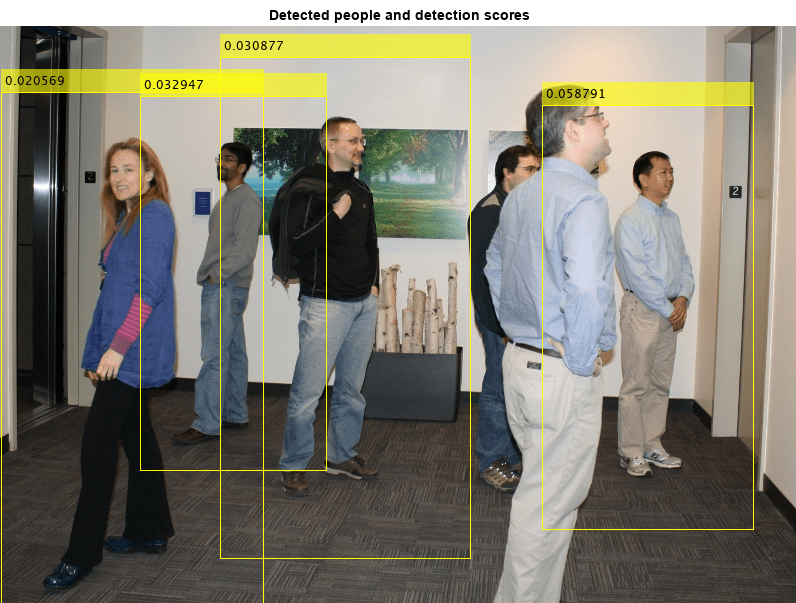
検出された人物に注釈を付けます。
I = insertObjectAnnotation(I,'rectangle',bboxes,scores); figure, imshow(I) title('Detected people and detection scores');
参照
[1] Dalal, N. and B. Triggs. “Histograms of Oriented Gradients for Human Detection,”Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, June 2005, pp. 886-893.