looptune
固定構造フィードバック ループの調整
構文
説明
[ は次のフィードバック ループを調整します。G,C,gam] = looptune(G0,C0,wc)
次の既定の要件を満たすように調整します。
帯域幅 — 各ループが周波数範囲
wcに収まるゲイン交差周波数性能 —
wcより低い周波数における積分動作ロバスト性 —
wcを超える周波数における適切な安定余裕とゲインのロールオフ
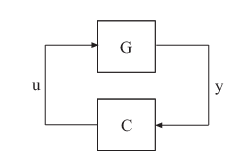
調整可能な genss モデル C0 は、コントローラーの構造体、パラメーターおよび初期値を指定します。モデル G0 はプラントを指定します。G0 は数値 LTI モデルにするか、調整可能な genss モデル (プラントとコントローラーを同時調整する場合) にすることができます。センサー信号 y (測定) とアクチュエータ信号 u (制御) は、プラントとコントローラーの境界を定義します。
メモ
looptune で Simulink® モデルを調整する場合は、slTuner (Simulink Control Design) を使用して Simulink モデルに対するインターフェイスを作成します。その後、slTuner の looptune (Simulink Control Design) を使って制御システムを調整できるようになります (Simulink Control Design™ が必要)。
例
次の図の制御システムを調整して、0.1 ~ 1 rad/min の交差を実現します。
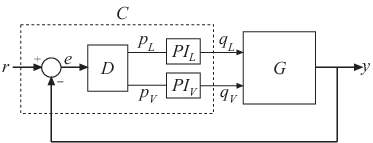
2 行 2 列プラント G は次のように表されます。
固定構造コントローラー C には 3 つの成分が含まれています。それは、2 行 2 列分離行列 D と 2 つの PI コントローラー PI_L および PI_V です。信号 r、y および e は次元 2 のベクトル値の信号です。
プラントを表す数値モデルとコントローラーを表す調整可能なモデルを作成します。図のようにすべての入力と出力に名前を付けて、プラントとコントローラーを制御信号と測定信号によって相互接続する方法が looptune で認識されるようにします。
s = tf('s'); G = 1/(75*s+1)*[87.8 -86.4; 108.2 -109.6]; G.InputName = {'qL','qV'}; G.OutputName = 'y'; D = tunableGain('Decoupler',eye(2)); D.InputName = 'e'; D.OutputName = {'pL','pV'}; PI_L = tunablePID('PI_L','pi'); PI_L.InputName = 'pL'; PI_L.OutputName = 'qL'; PI_V = tunablePID('PI_V','pi'); PI_V.InputName = 'pV'; PI_V.OutputName = 'qV'; sum1 = sumblk('e = r - y',2); C0 = connect(PI_L,PI_V,D,sum1,{'r','y'},{'qL','qV'}); wc = [0.1,1]; [G,C,gam,info] = looptune(G,C0,wc);
C は調整コントローラーで、この場合は C0 と同じタイプのブロックをもつ genss モデルです。
loopview を使用して調整結果を調べることができます。
入力引数
出力引数
アルゴリズム
looptune は、ターゲット帯域幅、性能要件、追加の設計要件を H∞ 最適化問題として表現する重み関数に自動変換します。変換後、looptune は systune を使用して、H∞ ノルムが最小となるように調整可能なパラメーターを最適化します。最適化アルゴリズムの詳細については、[1]を参照してください。
looptune は、[2]のアルゴリズムと SLICOT ライブラリの構造維持固有値ソルバーを使用して、H∞ ノルムを計算します。SLICOT ライブラリの詳細については、https://github.com/SLICOTを参照してください。
代替方法
looptune で Simulink モデルを調整する場合は、slTuner (Simulink Control Design) と looptune (Simulink Control Design) を参照してください (Simulink Control Design が必要)。
参照
[1] P. Apkarian and D. Noll, "Nonsmooth H-infinity Synthesis." IEEE Transactions on Automatic Control, Vol. 51, Number 1, 2006, pp. 71–86.
[2] Bruinsma, N.A., and M. Steinbuch. "A Fast Algorithm to Compute the H∞ Norm of a Transfer Function Matrix." Systems & Control Letters, 14, no.4 (April 1990): 287–93.
拡張機能
バージョン履歴
R2011b で導入参考
TuningGoal.Tracking | slTuner (Simulink Control Design) | systune | looptune (for slTuner) (Simulink Control Design) | TuningGoal.Gain | TuningGoal.LoopShape | hinfstruct (Robust Control Toolbox) | looptuneOptions | loopview | diskmargin (Robust Control Toolbox) | genss | connect