ステレオ ビジョン
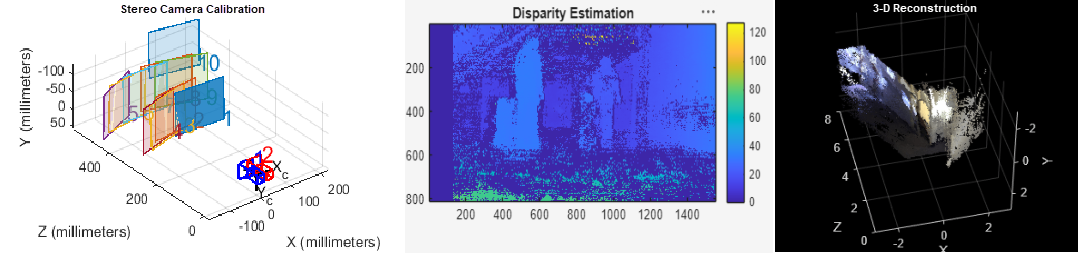
ステレオ ビジョンは、同じシーンの 2 つの視点を比較することで奥行き推定を可能にします。この計算の出力は 3 次元点群であり、各点はいずれかのイメージ内の一致した 1 つのピクセルに対応します。ワークフローはステレオ カメラのキャリブレーションから始まり、ステレオ カメラ キャリブレーター アプリを使用して、内部パラメーターと外部パラメーターを推定します。キャリブレーションが完了すると、ステレオ イメージ平行化によってイメージ ペアが共通平面上に整列され、視差推定のための対応点探索が簡略化されます。概要については、ステレオ カメラ キャリブレーター アプリの使用を参照してください。キャリブレーションされていないイメージに対してステレオ平行化を行うには、キャリブレーションされていないステレオイメージの平行化を参照してください。
ブロック マッチングやセミグローバル マッチングといった従来のアルゴリズムを使用して、視差マップを計算できます。次に、その視差マップを使用して、三角測量やエピポーラ幾何などの幾何学的原理を適用することで、高密度の 3 次元シーン再構成を行うことができます。詳細については、セミグローバル マッチングを使用した、ステレオ イメージ ペアからの 3 次元シーンの再構成とCompare RAFT Optical Flow and Semi-Global Matching for Stereo Reconstructionを参照してください。
ステレオ ビジョンは、visual SLAM や実世界での距離測定といった高度な応用も可能にします。詳細については、3D シミュレーションでの UAV ナビゲーション向けステレオ Visual SLAMとステレオ カメラから顔までの距離の測定を参照してください。
アプリ
| ステレオ カメラ キャリブレーター | ステレオ カメラの幾何学的パラメーターの推定 |
関数
トピック
- What Is Stereo Reconstruction?
Reconstruct 3-D scene using stereo vision.
- カメラ キャリブレーションとは
イメージまたはビデオ カメラのレンズとイメージ センサーのパラメーターを推定します。
- 座標系
ピクセル インデックス、空間座標、および 3 次元座標系の指定。
- ステレオ カメラ キャリブレーター アプリの使用
ステレオ カメラをキャリブレーションし、イメージから深度を復元するために使用できるようにする。
注目の例

セミグローバル マッチングを使用した、ステレオ イメージ ペアからの 3 次元シーンの再構成
視差マップからの各ピクセルに対応する点の 3 次元ワールド座標を再構成します。
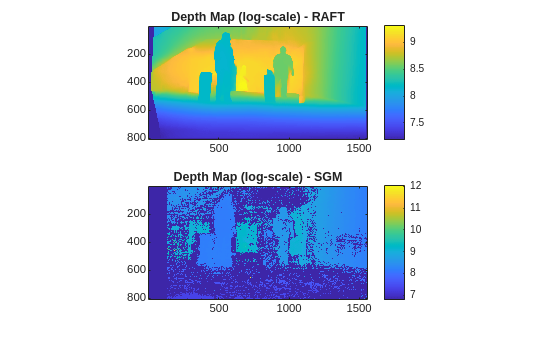
Compare RAFT Optical Flow and Semi-Global Matching for Stereo Reconstruction
Compare deep learning based RAFT optical flow model and classical semi-global matching algorithm for disparity estimation and stereo reconstruction applications.

ステレオ カメラから顔までの距離の測定
顔を検出し、カメラ シーンにおける顔とカメラの間の距離を計算します。

キャリブレーションされていないステレオイメージの平行化
2 つのキャリブレーションされていないイメージの平行化の計算。

Stereo Fisheye Camera Calibration
Calibrate a stereo fisheye camera by determining each camera's intrinsic parameters and estimate the baseline between them.

Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.

3D シミュレーションでの UAV ナビゲーション向けステレオ Visual SLAM
ステレオ カメラを搭載した UAV 用の Visual SLAM アルゴリズムの開発。

ステレオ Visual Simultaneous Localization and Mapping
ステレオ カメラのイメージ データを処理して、屋外環境マップを作成し、カメラの軌跡を推定します。

ステレオ ビデオからの深度推定
キャリブレートされたステレオ カメラで撮影したビデオに映っている人物を検出し、カメラとの距離を判定する。

ステレオ ビデオからの深度推定のためのコード生成
この例では、MATLAB® Coder™ を使用して MATLAB 関数の C コードを生成する方法を説明します。このコードは、ステレオ カメラ キャリブレーター アプリまたは関数 estimateCameraParameters で作成された stereoParameters オブジェクトを使用します。ここではステレオ ビデオからの深度推定の例にある MATLAB コードを変更して、コード生成がサポートされるようにする方法を説明します。