extrinsics
(非推奨) キャリブレートされたカメラの位置を計算
extrinsics は推奨されません。代わりに estimateExtrinsics 関数を使用してください。詳細については、バージョン履歴を参照してください。
説明
[ は、3 次元回転行列と 3 次元並進ベクトルを返し、ワールド座標の点をカメラ座標系に変換できるようにします。rotationMatrix,translationVector] = extrinsics(imagePoints,worldPoints,cameraParams)
例
一連のキャリブレーション イメージを作成します。
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration", "slr"));
イメージ内のチェッカーボードのコーナーを検出します。
[imagePoints,patternDims] = detectCheckerboardPoints(images.Files);
左上隅が (0,0) のパターン中心の座標系でチェッカーボードのコーナーのワールド座標を生成します。正方形のサイズはミリメートル単位です。
squareSize = 29;
worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);カメラのキャリブレーションを行います。
I = readimage(images,1);
imageSize = [size(I,1), size(I,2)];
cameraParams = estimateCameraParameters(imagePoints,worldPoints, ...
ImageSize=imageSize);
intrinsics = cameraParams.Intrinsics;新しい位置でイメージを読み込みます。
imOrig = imread(fullfile(matlabroot,"toolbox","vision","visiondata", ... "calibration","slr","image9.jpg")); figure imshow(imOrig); title("Input Image");
イメージの歪みを補正します。
[im,newIntrinsics] = undistortImage(imOrig,intrinsics,OutputView="full");新しいイメージで参照オブジェクトを検出します。
[imagePoints,patternDims] = detectCheckerboardPoints(im);
イメージ座標系のシフトを補正します。
newOrigin = intrinsics.PrincipalPoint - newIntrinsics.PrincipalPoint;
imagePoints = [imagePoints(:,1) + newOrigin(1), ...
imagePoints(:,2) + newOrigin(2)];新しい外部パラメーターを計算します。
[rotationMatrix, translationVector] = ...
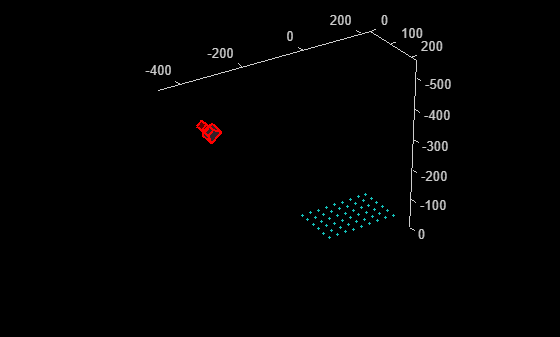
extrinsics(imagePoints,worldPoints,cameraParams);カメラの姿勢を計算します。
[orientation, location] = extrinsicsToCameraPose(rotationMatrix,translationVector); figure plotCamera(Location=location,Orientation=orientation,Size=20); hold on pcshow([worldPoints,zeros(size(worldPoints,1),1)], ... VerticalAxisDir="down",MarkerSize=40);
入力引数
出力引数
3 次元回転。3 行 3 列の行列として返されます。回転行列を並進ベクトルと共に使用して、ワールド座標からカメラ座標系に点を変換できます。

入力 imagePoints と入力 worldPoints をクラス double に設定すると、関数は rotationMatrix および translationVector を double として返します。そうでない場合、single になります。
3 次元並進。1 行 3 列のベクトルとして返されます。回転行列を並進ベクトルと共に使用して、ワールド座標からカメラ座標系に点を変換できます。
入力 imagePoints と入力 worldPoints をクラス double に設定すると、関数は rotationMatrix および translationVector を double として返します。そうでない場合、single になります。
アルゴリズム
関数 extrinsics は、worldPoints が M 行 2 列の行列として指定されているかどうかに応じて、2 つの異なるアルゴリズムを使用して外部パラメーターを計算します。z= 0 である同一平面上の点については、M 行 2 列の行列を使用してください。
関数 extrinsics は、1 つのイメージの回転行列と並進ベクトルを閉形式で計算します。キャリブレーション中は、すべてのキャリブレーション イメージで再投影誤差が最小になるように、外部パラメーターが数値的に推定されます。そのため、キャリブレーション イメージの 1 つに対して関数 extrinsics を使用すると、キャリブレーション中に得られたものとは少し異なる回転行列と並進ベクトルが返されることがあります。