3 次元ビジョン
3 次元ビジョンは、視覚データを使用して世界の 3 次元構造を把握し、再構成するのに役立ちます。Computer Vision Toolbox™ を使用すると、エピポーラ幾何を使用したカメラ姿勢の推定、複数の視点からの 3 次元点の三角測量、およびバンドル調整による結果の最適化を行うことができます。ツールボックスは、ステレオ カメラのキャリブレーション、イメージ平行化、視差マップの計算、高密度 3 次元再構成といった、ステレオ ビジョン ワークフローもサポートしています。また、イメージ データおよび点データの管理、姿勢グラフの構築、および空間関係の可視化を行うためのツールも提供し、マルチビュー幾何を使用した正確な 3 次元シーン再構成を可能にします。
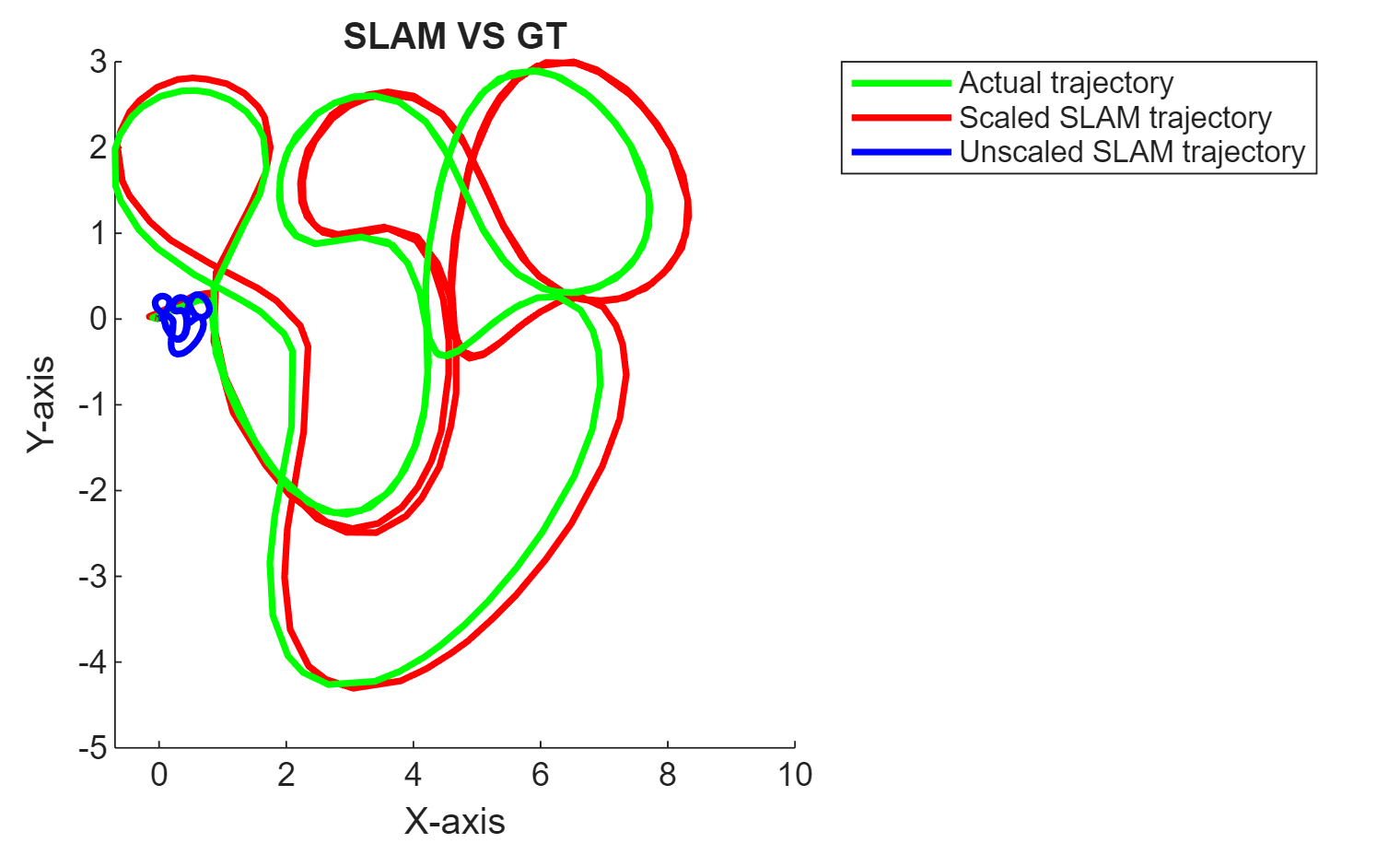
visual SLAM を使用すると、単眼カメラ、ステレオ カメラ、または RGB-D カメラからの入力に基づいて、カメラの位置を特定すると同時に、その周囲の地図をリアルタイムで構築できます。ツールボックスは、visual SLAM による慣性センサー フュージョンをサポートしており、位置推定の精度を向上させることが可能です。軌跡の精度を可視化および評価し、コード生成を使用して visual SLAM を展開できます。
ツールボックスは、包括的な structure from motion (SfM) パイプラインも提供します。これは、異なる視点から撮影された複数の 2 次元イメージから 3 次元シーンを再構成するのに役立ちます。特徴点の検出とマッチング、カメラ姿勢の推定、点の三角測量、およびバンドル調整を使用した結果の最適化を行うことができます。高密度な再構成や新規視点合成のためにニューラル放射輝度場 (NeRF) を適用することも可能です。
最後に、3 次元点群を処理して、地図作成、位置推定、オブジェクト モデリングをサポートすることもできます。点群データに対して、前処理、可視化、レジストレーション、および幾何学的形状の適合を行うことができます。ツールボックスは、3 次元点群を使用した地図作成や、SLAM アルゴリズムの実装をサポートしています。
カテゴリ
- カメラ姿勢推定と 3 次元再構成
3 次元再構成のための、基礎的なエピポーラ幾何を用いたカメラ姿勢の推定、三角測量、およびバンドル調整
- ステレオ ビジョン
ステレオ カメラのキャリブレーション、平行化、視差推定、および高密度 3 次元再構成
- Visual SLAM
単眼カメラ、RGB-D カメラ、またはステレオ カメラと慣性センサー フュージョンによるリアルタイムの視覚自己位置推定・地図作成 (vSLAM) と展開サポート
- structure from motion
インクリメンタル structure from motion と NeRF を使用して、複数のビューから 3 次元シーン構造を再構成する
- 点群の処理
幾何学的形状の前処理、可視化、レジストレーション、近似、ならびにマップの作成、SLAM アルゴリズムの実装、3 次元点群を使った深層学習の使用
注目の例

Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code.
Performant Monocular Visual-Inertial SLAM
Use visual inputs from a camera and positional data from an IMU to perform viSLAM in real time.
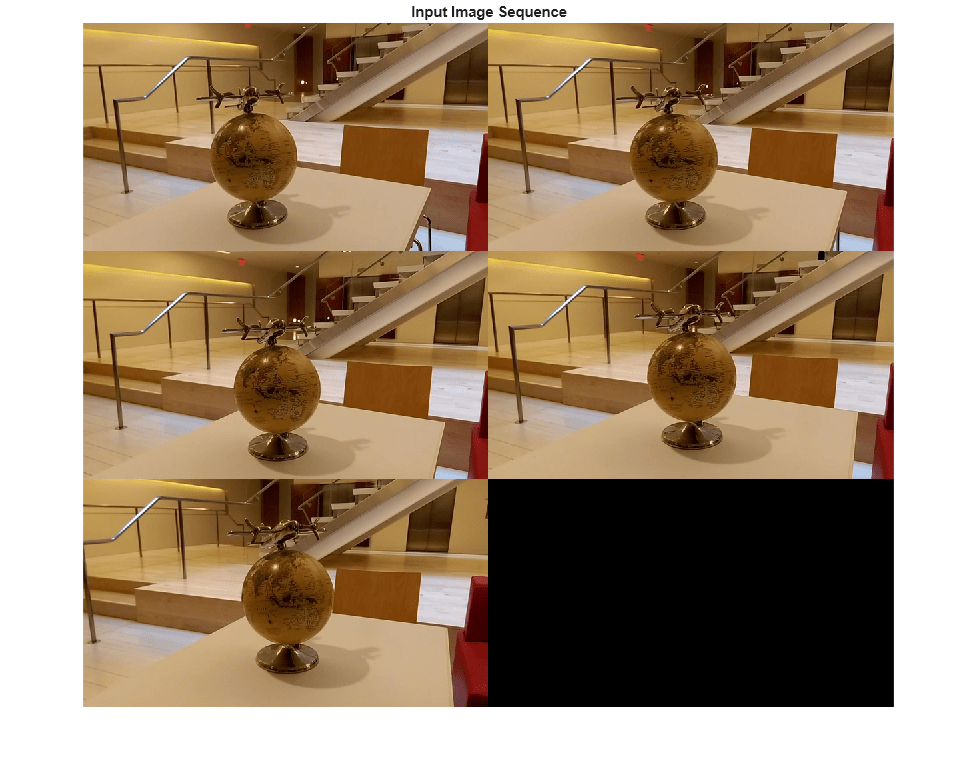
Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion.
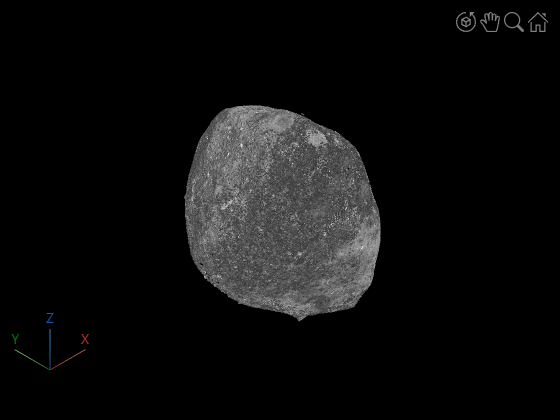
Dense 3-D Reconstruction of Asteroid Surface from Image Sequence
Reconstruct dense 3-D point cloud and continuous surface mesh for an asteroid using 2-D images.

Augmented Reality Using AprilTag Markers
Use marker-based augmented reality to render virtual content into a scene.

Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
Implement and generate C ++ code for a vSLAM algorithm that estimates poses for the TUM RGB-D Benchmark and deploy as an ROS node to a remote device.

Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.

ステレオ ビデオからの深度推定
キャリブレートされたステレオ カメラで撮影したビデオに映っている人物を検出し、カメラとの距離を判定する。

キャリブレーションされていないステレオイメージの平行化
2 つのキャリブレーションされていないイメージの平行化の計算。

Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data obtained from the Unreal Engine® simulation environment.

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Perform monocular visual-inertial odometry using tightly coupled factor graph optimization.
Reconstruct 3-D Scenes and Synthesize Novel Views Using Neural Radiance Field Model
Reconstruct 3-D scenes and synthesize novel views from a set of 2-D images using the Nerfacto Neural Radiance Field (NeRF) model.