アルゴリズムの開発と PX4 Autopilot での展開
アルゴリズムを開発し、PX4 Autopilot に展開するモデルを準備します。これらのトピックには、モデル コンフィギュレーション パラメーター、COM ポートの設定、および Simulink® からの PX4 Autopilot の展開に関する追加情報が記載されています。
ブロック
関数
getMATFilesFromPixhawk | Retrieve MAT files from SD card inserted on Pixhawk hardware board |
px4MATFilestitcher | Combine multiple MAT-files retrieved from SD card into a single MAT-file |
createPX4uORBMessage | Simulink モデルにおいて、ログ用のカスタム uORB トピックを作成する (R2023b 以降) |
createCustomPX4Parameter | Create custom PX4 parameter for writing to the PX4 system parameter (R2025a 以降) |
トピック
Simulink モデルの設定
- Model Configuration Parameters for PX4 Flight Controller
Parameter and configuration options for creating and running applications on PX4® flight controller - Set COM Port for Upload and Communication in Simulink
Set COM port for Upload and Communication in Simulink models. - Deployment on Cube Orange Autopilot from Simulink
Deploy Simulink generated code to Cube Orange Autopilot. - Deployment on Cube Blue H7 Autopilot from Simulink
Deploy Simulink generated code to Cube Blue H7 Autopilot. - Deployment on Unsupported PX4 Autopilots from Simulink
Deploy Simulink generated code to unsupported PX4 Autopilot.
PX4 Autopilot の周辺装置の情報
- Index Numbers for Analog Channels on Pixhawk Series Controller Boards
Identify the index numbers for signals from analog channels. - Serial Port Names and Corresponding Labels on PX4 Flight Controller Boards
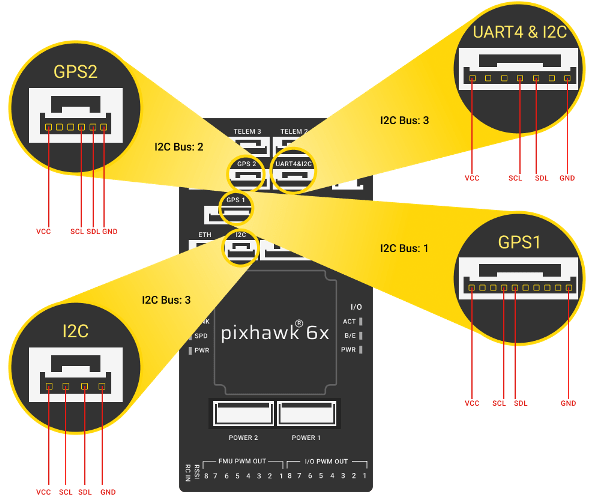
Identify the UART/USART port number for the labels seen on PX4 flight controller boards. - I2C Bus Port Numbers for Labels on PX4 Autopilots
Identify the bus port number for the labels seen on PX4 flight controller boards
PX4 Autopilot との MAVLink 通信
- Connecting to NSH Terminal for Debugging
Connect to the NSH terminal of Pixhawk® Series controller for debugging.
追加情報
- Migrating from Pixhawk Pilot Support Package to UAV Toolbox Support Package for PX4 Autopilots
Migrate from existing Pixhawk Pilot Support Package to the new UAV Toolbox Support Package for PX4 Autopilots. - Getting Started with uORB Blocks for PX4 Autopilots Support Package
Read and write uORB messages using PX4 uORB Read and PX4 uORB Write blocks. - Connecting to NSH Terminal for Debugging
Debug PX4 autopilot using NSH terminal.
トラブルシューティング
Troubleshooting Deploy to Hardware Issues
Solve the problems when you try to deploy the Simulink model to Pixhawk Series flight controllers.
Troubleshooting PX4 Firmware Build Failure Due to Flash Memory Overflow on the Hardware
Solve the flash memory overflow on the hardware issues while using the default px4 board build target file.
Troubleshooting Running Out of File Descriptor Issues
Solve the running out of file descriptor issues.
Troubleshooting USB Issues with Cube Orange on Windows
Solve the USB issues with Cube Orange.
注目の例
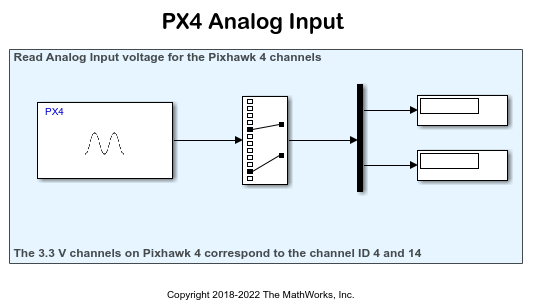
Getting Started with PX4 Analog Input Block for ADC Channels
Read voltage of ADC pins on Pixhawk series controller using PX4 Analog Input block.

Getting Started with PX4 Write Parameter Block
Write parameter values to PX4 flight controllers using PX4 Write Parameter block.
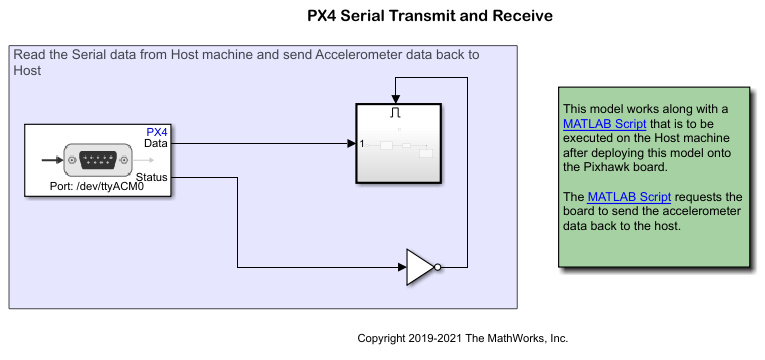
Getting Started with Serial Receive and Serial Transmit Blocks
Get and send serial data to PX4 autopilot using Serial Receive and Serial Transmit blocks.
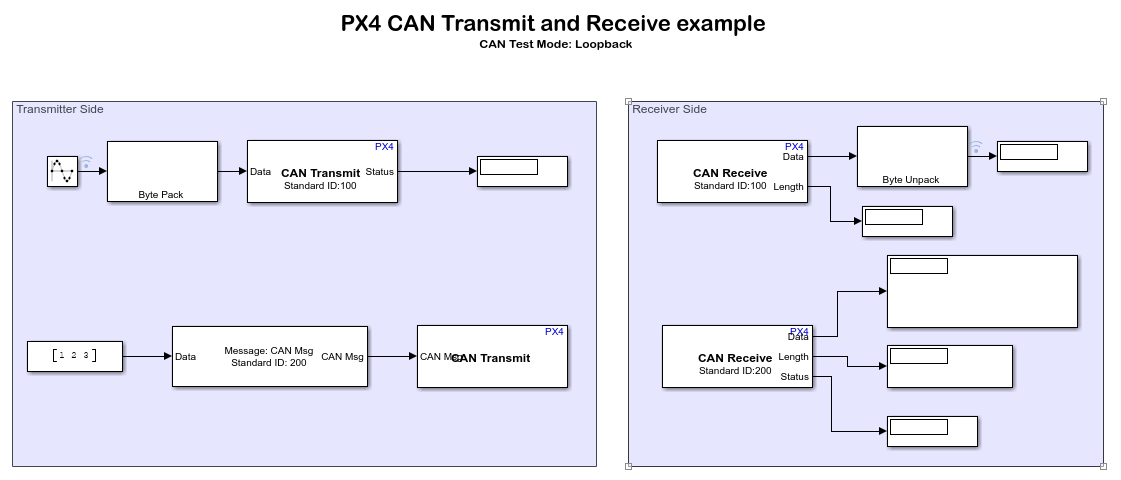
Getting Started with PX4 CAN Receive and PX4 CAN Transmit Blocks
Get and send control area network (CAN) messages to PX4 autopilot using PX4 CAN Receive and PX4 CAN Transmit blocks.
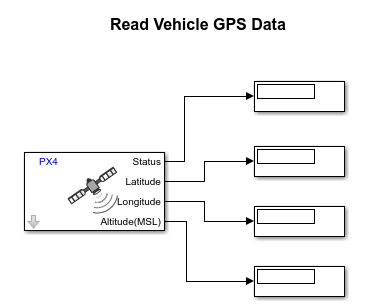
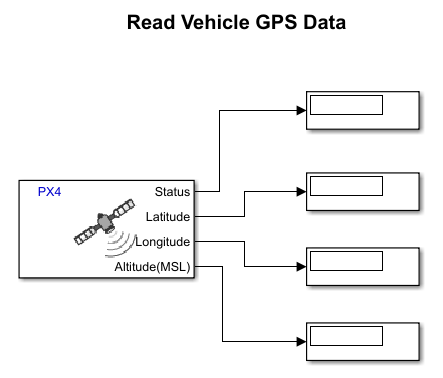
Read GPS Data from PX4 Autopilot
Read GPS data from PX4 autopilot in Simulink using GPS block.
Read GPS Data over UAVCAN
Read UAVCAN GPS data from PX4 autopilot in Simulink using GPS block.
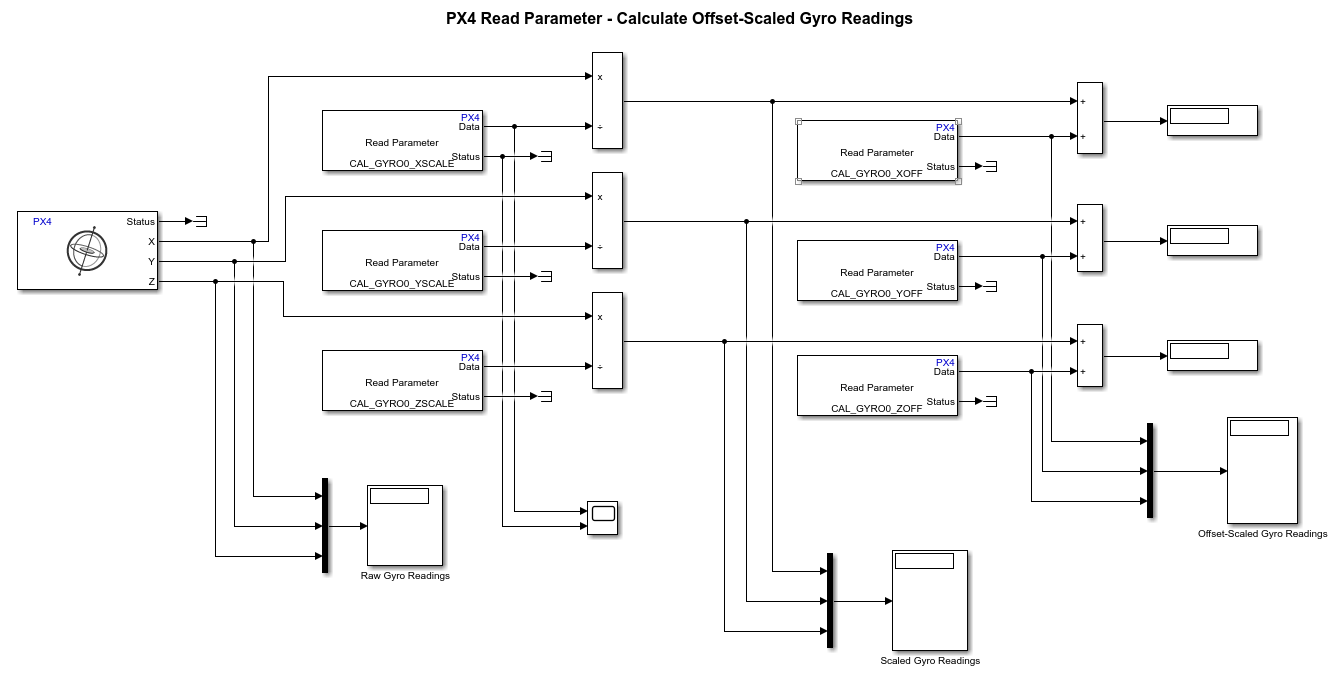
Read PX4 System Parameters from PX4 Autopilot
Read system parameters from PX4 autopilot using Read Parameter block.
Read Accelerometer Values from I2C Based Sensor Connected to PX4 Autopilot
Read accelerometer values from I2C based sensor using I2C Controller Read block.
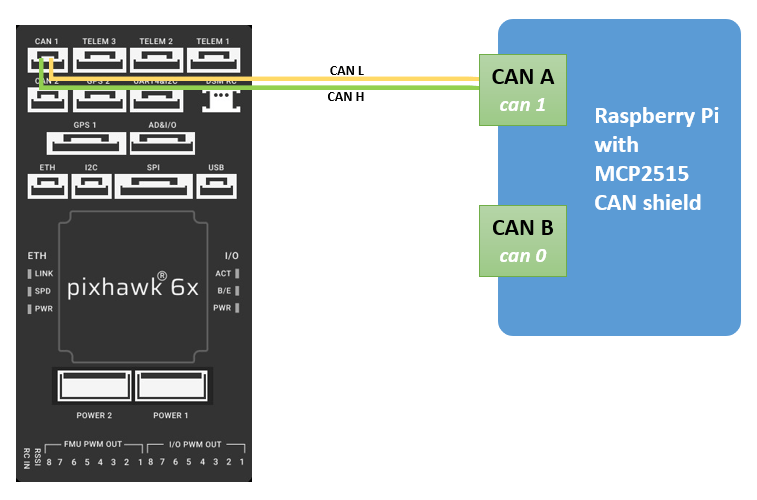
CAN Communication with Pixhawk Using Raspberry Pi
Establish a CAN communication between Pixhawk® hardware and Raspberry Pi® hardware.
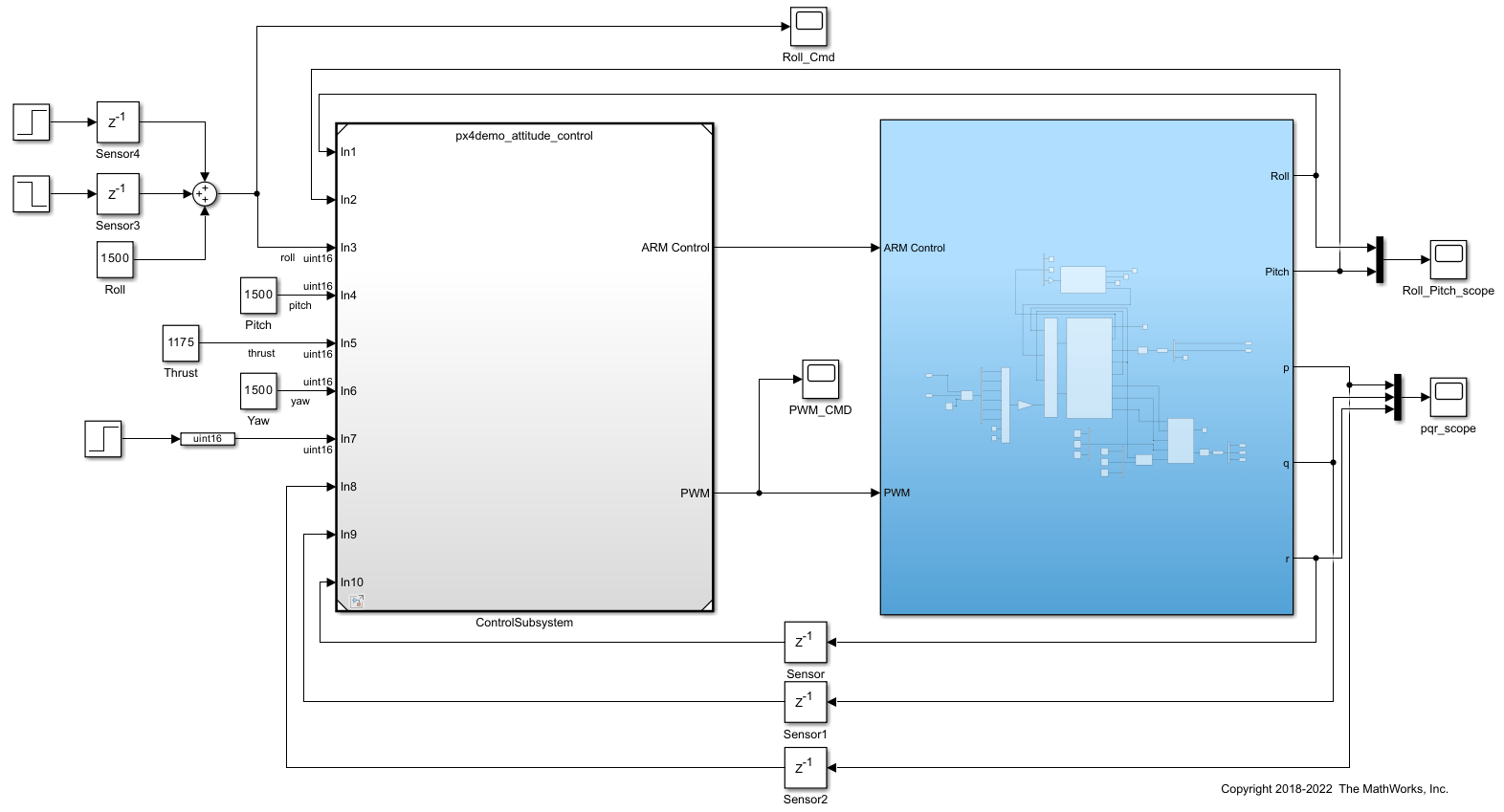
Plant and Attitude Controller Model for Hexacopter
Create hexacopter plant and attitude controller for PX4 autopilot.