Main Content
Run Monitor & Tune Simulation on PX4 Autopilot (External Mode)
Monitor signals and tune parameters running on the Simulink models running on
PX4 Autopilots
Learn how to use UAV Toolbox Support Package for PX4 Autopilots for code verification and validation with Processor-in-the-Loop (PIL).
Featured Examples
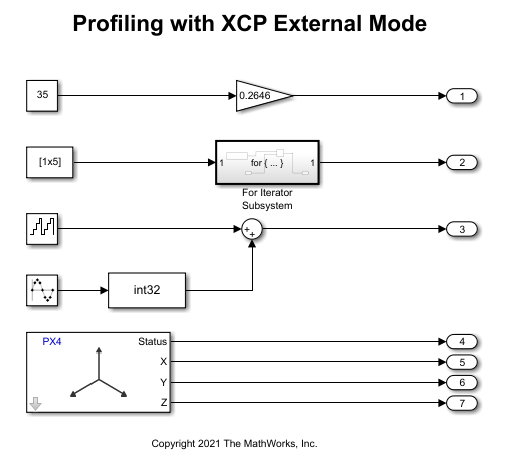
Code Execution Profiling on PX4 Target in Monitor & Tune Simulation
Use the UAV Toolbox Support Package for PX4 Autopilots to profile the real-time execution of the generated code running as an executable on a PX4 target hardware with XCP on Serial Interface.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)