UAV Toolbox Support Package for PX4 Autopilots 入門
UAV Toolbox Support Package for PX4® Autopilots の基礎を学ぶ
UAV Toolbox Support Package for PX4 Autopilots の基礎を学びます。
注目の例
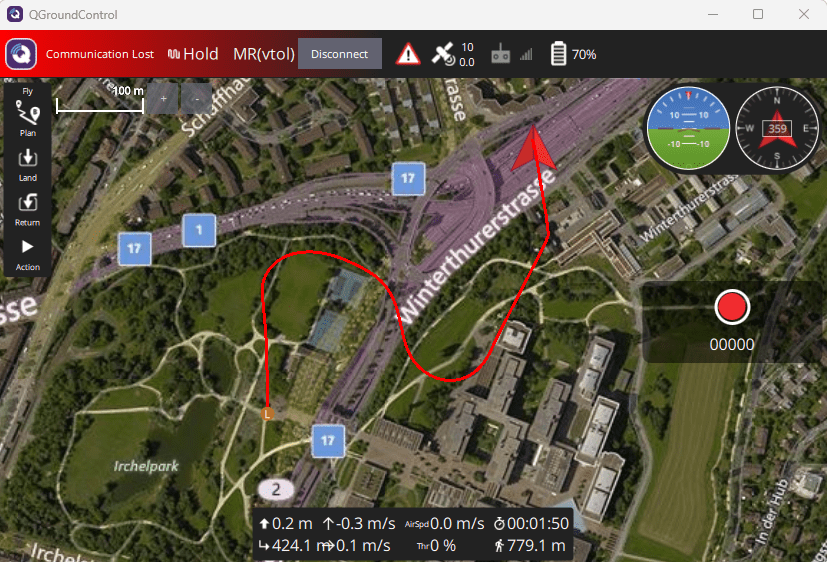
PX4 Hardware-in-the-Loop (HITL) Simulation with VTOL UAV
Use the UAV Toolbox Support Package for PX4® Autopilots to verify a UAV controller design by using Hardware-in-the-Loop (HITL) simulation on a Pixhawk autopilot.

Position Tracking for X-Configuration Quadcopter Using Rate Controller
Use the UAV Toolbox Support Package for PX4® Autopilots to design a position controller using rate control for an X-configuration quadcopter. In this example, you also verify the controller design using the PX4 Host Target and jMAVSim simulator.
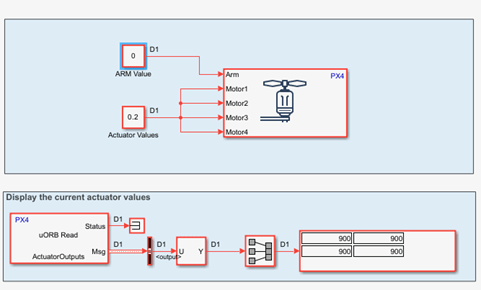
Getting Started with Actuator Control over PWM
Use the PX4 Actuator Write block to write actuator values over PWM.