サポートされている PX4 Autopilot
UAV Toolbox Support Package for PX4® Autopilots を使用して、PX4 フライト スタックに基づく飛行制御アルゴリズムをモデル化でき、同じものを次の Autopilot に展開できます。
Cube Blue H7
Cube Orange
Cube Orange Plus
CUAV X7+
Pixhawk® 6c
Pixhawk 6x
Pixhawk 4
Cube (Pixhawk 2.1)
Pixhawk 1 (mRo)
Pixracer
UVify IFO-S
このサポート パッケージは、ここにリストされているその他の PX4 Autopilot でも使用できます。これらの Autopilot は Pixhawk FMU プロジェクトに基づいて設計されており、FMU 構成を使用してファームウェアをビルドします。ただし、これらのコントローラーでは機能全体はテストされていません。
上記以外の PX4 Autopilot のサポート
上記以外の PX4 Autopilot がある場合は、Simulink® で現在サポートされている PX4 バージョン (v1.15.4) でそのハードウェアがサポートされているかどうかを確認します。
Autopilot が PX4 v1.15.4 用のサポートされている Autopilot のリストに記載されている場合は、サポート パッケージでの使用を検討できます。ただし、これらのコントローラーでは機能全体はテストされていません。Pixhawk の標準/サポートされている Autopilot を使用すると、機能が確保される可能性が高まります。製造元がサポートする Autopilot の使用は推奨されません。試験段階の Autopilot と提供終了した Autopilot はサポートされません。
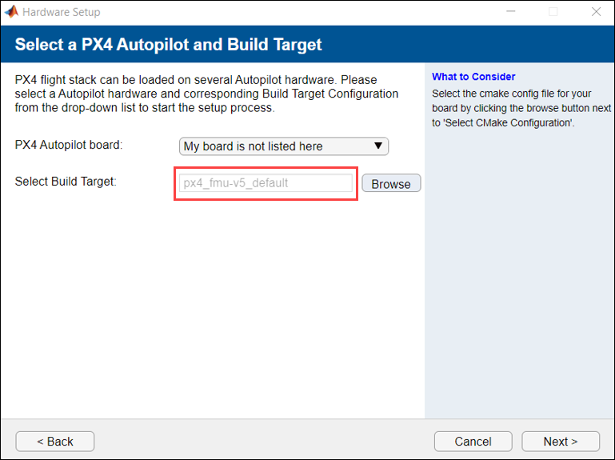
正式にテストされた上記の一連の Autopilot に属していない Autopilot の使用を開始するには、ハードウェア セットアップでオプション [My board is not listed here] を選択します。

ビルドする PX4 Firmware の対応する CMake ビルド ターゲットを参照します。
対応する make コマンドを入力して、対応するターゲットのファームウェアをビルドすることが必要になる場合もあります。
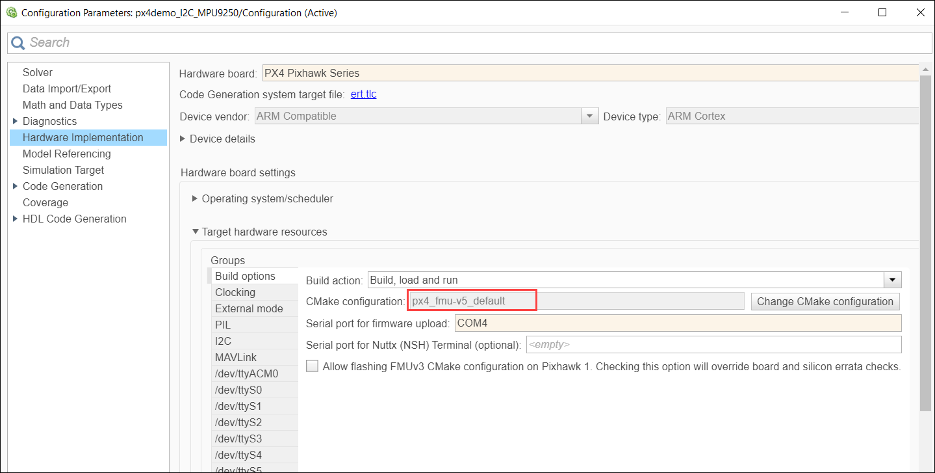
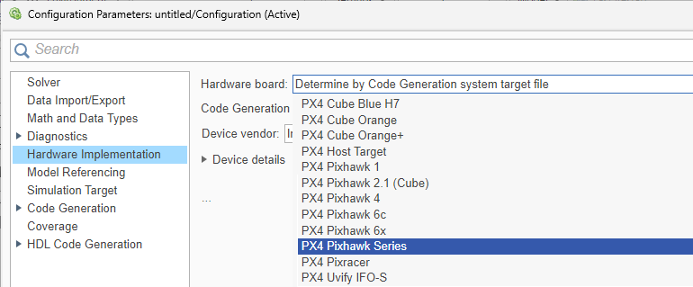
ハードウェア セットアップが完了し、選択したビルド ターゲットの PX4 Firmware が正常にビルドされたら、Simulink モデル コンフィギュレーション設定でハードウェア ボードとして PX4 Pixhawk シリーズを選択することで、Simulink で Autopilot を使用できます。
ハードウェア セットアップで選択した CMake ビルド ターゲットが CMake コンフィギュレーションに自動的に表示されます。